387e00fcf2e72ed2c7baeffe18984fe2a35cc849,donkeycar/parts/actuator.py,PWMSteering,run,#PWMSteering#Any#,240
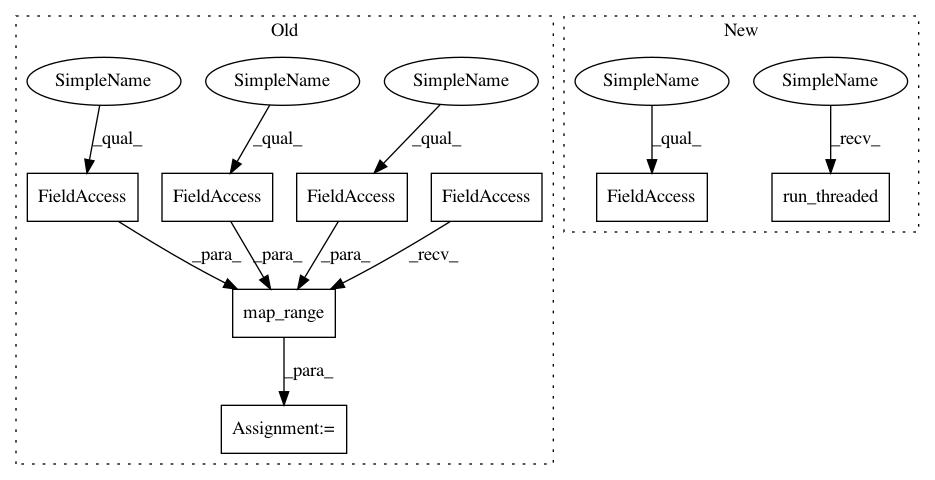
Before Change
def run(self, angle):
//map absolute angle to angle that vehicle can implement.
pulse = dk.utils.map_range(angle,
self.LEFT_ANGLE, self.RIGHT_ANGLE,
self.left_pulse, self.right_pulse)
self.controller.set_pulse(pulse)
def shutdown(self):
After Change
self.left_pulse, self.right_pulse)
def run(self, angle):
self.run_threaded(angle)
self.controller.set_pulse(self.pulse)
def shutdown(self):
// set steering straight
In pattern: SUPERPATTERN
Frequency: 4
Non-data size: 8
Instances
Project Name: autorope/donkeycar
Commit Name: 387e00fcf2e72ed2c7baeffe18984fe2a35cc849
Time: 2019-11-27
Author: wallarug@coliemore.com.au
File Name: donkeycar/parts/actuator.py
Class Name: PWMSteering
Method Name: run
Project Name: autorope/donkeycar
Commit Name: 387e00fcf2e72ed2c7baeffe18984fe2a35cc849
Time: 2019-11-27
Author: wallarug@coliemore.com.au
File Name: donkeycar/parts/actuator.py
Class Name: PWMThrottle
Method Name: run
Project Name: autorope/donkeycar
Commit Name: acc4acd538200f8145738ababf62f189461e39e7
Time: 2019-10-26
Author: dirk.prange@web.de
File Name: donkeycar/parts/actuator.py
Class Name: PWMThrottle
Method Name: run
Project Name: autorope/donkeycar
Commit Name: 387e00fcf2e72ed2c7baeffe18984fe2a35cc849
Time: 2019-11-27
Author: wallarug@coliemore.com.au
File Name: donkeycar/parts/actuator.py
Class Name: PWMSteering
Method Name: run
Project Name: autorope/donkeycar
Commit Name: acc4acd538200f8145738ababf62f189461e39e7
Time: 2019-10-26
Author: dirk.prange@web.de
File Name: donkeycar/parts/actuator.py
Class Name: PWMSteering
Method Name: run