6af4a5b9b2755606c4e0becfe1fc876d33130526,gym/envs/mujoco/mujoco_env.py,MujocoEnv,get_body_com,#MujocoEnv#Any#,124
Before Change
return self.viewer
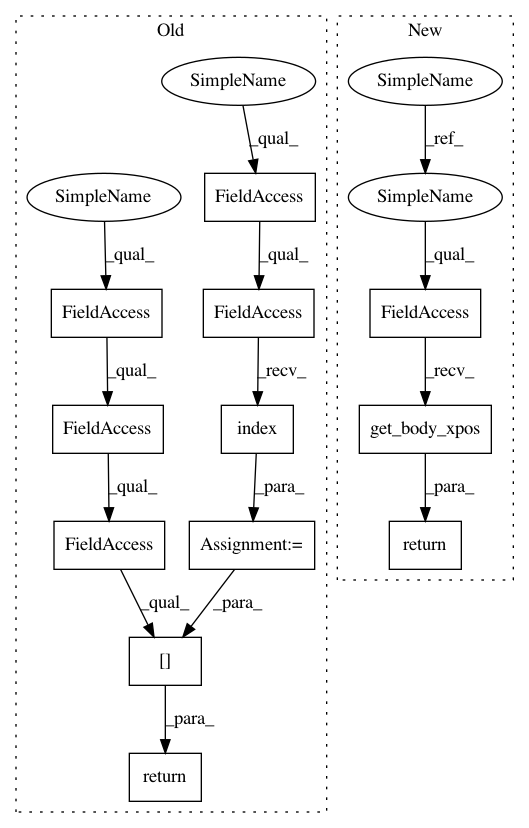
def get_body_com(self, body_name):
idx = self.model.body_names.index(six.b(body_name))
return self.model.data.com_subtree[idx]
def get_body_comvel(self, body_name):
idx = self.model.body_names.index(six.b(body_name))
return self.model.body_comvels[idx]
After Change
self.viewer_setup()
return self.viewer
def get_body_com(self, body_name):
return self.data.get_body_xpos(body_name)
def state_vector(self):
return np.concatenate([
self.sim.data.qpos.flat,
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 12
Instances
Project Name: openai/gym
Commit Name: 6af4a5b9b2755606c4e0becfe1fc876d33130526
Time: 2018-01-24
Author: matthiasplappert@me.com
File Name: gym/envs/mujoco/mujoco_env.py
Class Name: MujocoEnv
Method Name: get_body_com
Project Name: rlworkgroup/garage
Commit Name: 2e5529524e9f838e9f82f8238313557217c67f6b
Time: 2018-05-29
Author: jonashen@users.noreply.github.com
File Name: rllab/envs/mujoco/mujoco_env.py
Class Name: MujocoEnv
Method Name: get_body_com
Project Name: rlworkgroup/garage
Commit Name: 2e5529524e9f838e9f82f8238313557217c67f6b
Time: 2018-05-29
Author: jonashen@users.noreply.github.com
File Name: rllab/envs/mujoco/half_cheetah_env.py
Class Name: HalfCheetahEnv
Method Name: get_body_com