f33e7b5201494eb52360efc14dbfc7e6eeb02096,examples/mujoco_all_sac_real_nvp_hierarchy.py,,run_experiment,#Any#,191
Before Change
low_level_policy = load_low_level_policy(policy_path=low_level_policy_path)
if variant["env_name"] == "ant":
ant_env = normalize(AntEnv())
env = HierarchyProxyEnv(wrapped_env=ant_env,
low_level_policy=low_level_policy)
elif variant["env_name"] == "random-goal-swimmer":
random_goal_swimmer_env = normalize(RandomGoalSwimmerEnv(
reward_type=variant["env_reward_type"],
goal_reward_weight=variant["env_goal_reward_weight"],
goal_radius=variant["env_goal_radius"],
terminate_at_goal=variant["env_terminate_at_goal"],
))
env = HierarchyProxyEnv(wrapped_env=random_goal_swimmer_env,
low_level_policy=low_level_policy)
elif variant["env_name"] == "random-goal-ant":
random_goal_ant_env = normalize(RandomGoalAntEnv(
reward_type=variant["env_reward_type"],
goal_reward_weight=variant["env_goal_reward_weight"],
goal_radius=variant["env_goal_radius"],
terminate_at_goal=variant["env_terminate_at_goal"],
))
env = HierarchyProxyEnv(wrapped_env=random_goal_ant_env,
low_level_policy=low_level_policy)
elif variant["env_name"] == "humanoid-rllab":
humanoid_env = normalize(HumanoidEnv())
env = HierarchyProxyEnv(wrapped_env=humanoid_env,
low_level_policy=low_level_policy)
pool = SimpleReplayBuffer(
env_spec=env.spec,
max_replay_buffer_size=variant["max_pool_size"],
)
After Change
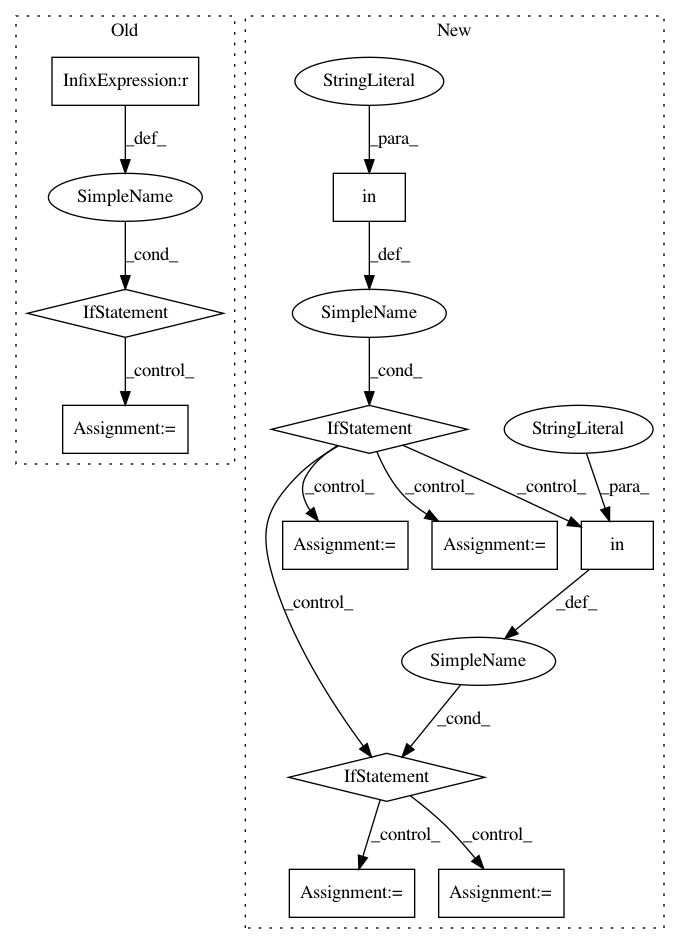
env_name = variant["env_name"]
env_type = env_name.split("-")[-1]
if "random-goal" in env_name:
EnvClass = RANDOM_GOAL_ENVS[env_type]
env_args = {
name.replace("env_", "", 1): value
for name, value in variant.items()
if name.startswith("env_") and name != "env_name"
}
env = normalize(EnvClass(**env_args))
elif "rllab" in variant["env_name"]:
EnvClass = RLLAB_ENVS[variant["env_name"]]
base_env = normalize(EnvClass())
env = HierarchyProxyEnv(wrapped_env=base_env,
low_level_policy=low_level_policy)
else:
raise NotImplementedError
pool = SimpleReplayBuffer(
env_spec=env.spec,
max_replay_buffer_size=variant["max_pool_size"],
)
In pattern: SUPERPATTERN
Frequency: 4
Non-data size: 11
Instances
Project Name: rail-berkeley/softlearning
Commit Name: f33e7b5201494eb52360efc14dbfc7e6eeb02096
Time: 2018-05-22
Author: kristian.hartikainen@gmail.com
File Name: examples/mujoco_all_sac_real_nvp_hierarchy.py
Class Name:
Method Name: run_experiment
Project Name: hyperspy/hyperspy
Commit Name: eea5b10faa94c06bef0fca943ae26e9908dbe495
Time: 2017-01-07
Author: eric.prestat@gmail.com
File Name: hyperspy/misc/date_time_tools.py
Class Name:
Method Name: update_date_time_in_metadata
Project Name: hls-fpga-machine-learning/hls4ml
Commit Name: e2c82d3fec3b127db07e557d3437aa52243bbe9a
Time: 2020-07-29
Author: minhduc8199@gmail.com
File Name: hls4ml/utils/example_models.py
Class Name:
Method Name: fetch_example_model
Project Name: prody/ProDy
Commit Name: 0b8fa85175f95425807d6d38a38d0c6fae737e57
Time: 2018-05-14
Author: jamesmkrieger@gmail.com
File Name: prody/dynamics/nmdfile.py
Class Name:
Method Name: parseNMD