f72a9854c23f9101e75cf7c13fbf8232128a896a,tf_agents/agents/sac/examples/train_eval_mujoco.py,,train_eval,#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#Any#,80
Before Change
py_metrics.AverageEpisodeLengthMetric(buffer_size=num_eval_episodes),
]
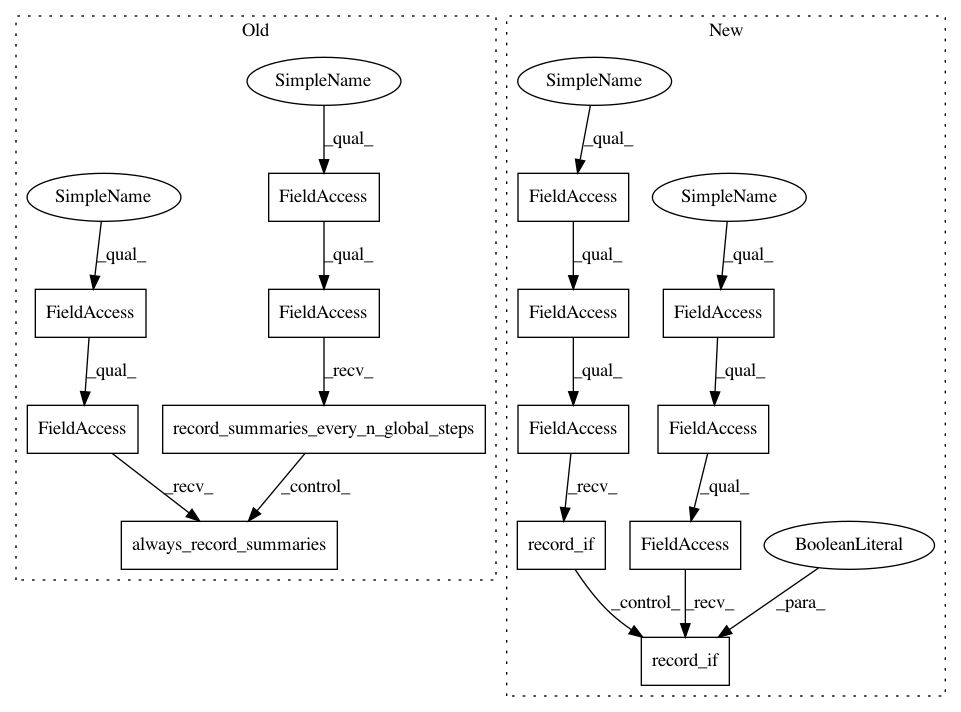
with tf.contrib.summary.record_summaries_every_n_global_steps(
summary_interval):
// Create the environment.
tf_env = tf_py_environment.TFPyEnvironment(suite_mujoco.load(env_name))
eval_py_env = suite_mujoco.load(env_name)
// Get the data specs from the environment
time_step_spec = tf_env.time_step_spec()
observation_spec = time_step_spec.observation
action_spec = tf_env.action_spec()
actor_net = actor_distribution_network.ActorDistributionNetwork(
observation_spec,
action_spec,
fc_layer_params=actor_fc_layers,
continuous_projection_net=normal_projection_net)
critic_net = critic_network.CriticNetwork(
(observation_spec, action_spec),
observation_fc_layer_params=critic_obs_fc_layers,
action_fc_layer_params=critic_action_fc_layers,
joint_fc_layer_params=critic_joint_fc_layers)
global_step = tf.compat.v1.train.get_or_create_global_step()
tf_agent = sac_agent.SacAgent(
time_step_spec,
action_spec,
actor_network=actor_net,
critic_network=critic_net,
actor_optimizer=tf.compat.v1.train.AdamOptimizer(
learning_rate=actor_learning_rate),
critic_optimizer=tf.compat.v1.train.AdamOptimizer(
learning_rate=critic_learning_rate),
alpha_optimizer=tf.compat.v1.train.AdamOptimizer(
learning_rate=alpha_learning_rate),
target_update_tau=target_update_tau,
target_update_period=target_update_period,
td_errors_loss_fn=td_errors_loss_fn,
gamma=gamma,
reward_scale_factor=reward_scale_factor,
gradient_clipping=gradient_clipping,
debug_summaries=debug_summaries,
summarize_grads_and_vars=summarize_grads_and_vars,
train_step_counter=global_step)
// Make the replay buffer.
replay_buffer = tf_uniform_replay_buffer.TFUniformReplayBuffer(
data_spec=tf_agent.collect_data_spec,
batch_size=1,
max_length=replay_buffer_capacity)
replay_observer = [replay_buffer.add_batch]
eval_py_policy = py_tf_policy.PyTFPolicy(tf_agent.policy)
train_metrics = [
tf_metrics.NumberOfEpisodes(),
tf_metrics.EnvironmentSteps(),
tf_py_metric.TFPyMetric(py_metrics.AverageReturnMetric()),
tf_py_metric.TFPyMetric(py_metrics.AverageEpisodeLengthMetric()),
]
collect_policy = tf_agent.collect_policy
initial_collect_op = dynamic_step_driver.DynamicStepDriver(
tf_env,
collect_policy,
observers=replay_observer + train_metrics,
num_steps=initial_collect_steps).run()
collect_op = dynamic_step_driver.DynamicStepDriver(
tf_env,
collect_policy,
observers=replay_observer + train_metrics,
num_steps=collect_steps_per_iteration).run()
// Prepare replay buffer as dataset with invalid transitions filtered.
def _filter_invalid_transition(trajectories, unused_arg1):
return ~trajectories.is_boundary()[0]
dataset = replay_buffer.as_dataset(
sample_batch_size=5 * batch_size,
num_steps=2).apply(tf.data.experimental.unbatch()).filter(
_filter_invalid_transition).batch(batch_size).prefetch(
batch_size * 5)
dataset_iterator = tf.compat.v1.data.make_initializable_iterator(dataset)
trajectories, unused_info = dataset_iterator.get_next()
train_op = tf_agent.train(trajectories)
for train_metric in train_metrics:
train_metric.tf_summaries(step_metrics=train_metrics[:2])
summary_op = tf.contrib.summary.all_summary_ops()
with eval_summary_writer.as_default(), \
tf.contrib.summary.always_record_summaries():
for eval_metric in eval_metrics:
eval_metric.tf_summaries()
After Change
]
global_step = tf.compat.v1.train.get_or_create_global_step()
with tf.compat.v2.summary.record_if(
lambda: tf.math.equal(global_step % summary_interval, 0)):
// Create the environment.
tf_env = tf_py_environment.TFPyEnvironment(suite_mujoco.load(env_name))
eval_py_env = suite_mujoco.load(env_name)
// Get the data specs from the environment
time_step_spec = tf_env.time_step_spec()
observation_spec = time_step_spec.observation
action_spec = tf_env.action_spec()
actor_net = actor_distribution_network.ActorDistributionNetwork(
observation_spec,
action_spec,
fc_layer_params=actor_fc_layers,
continuous_projection_net=normal_projection_net)
critic_net = critic_network.CriticNetwork(
(observation_spec, action_spec),
observation_fc_layer_params=critic_obs_fc_layers,
action_fc_layer_params=critic_action_fc_layers,
joint_fc_layer_params=critic_joint_fc_layers)
tf_agent = sac_agent.SacAgent(
time_step_spec,
action_spec,
actor_network=actor_net,
critic_network=critic_net,
actor_optimizer=tf.compat.v1.train.AdamOptimizer(
learning_rate=actor_learning_rate),
critic_optimizer=tf.compat.v1.train.AdamOptimizer(
learning_rate=critic_learning_rate),
alpha_optimizer=tf.compat.v1.train.AdamOptimizer(
learning_rate=alpha_learning_rate),
target_update_tau=target_update_tau,
target_update_period=target_update_period,
td_errors_loss_fn=td_errors_loss_fn,
gamma=gamma,
reward_scale_factor=reward_scale_factor,
gradient_clipping=gradient_clipping,
debug_summaries=debug_summaries,
summarize_grads_and_vars=summarize_grads_and_vars,
train_step_counter=global_step)
// Make the replay buffer.
replay_buffer = tf_uniform_replay_buffer.TFUniformReplayBuffer(
data_spec=tf_agent.collect_data_spec,
batch_size=1,
max_length=replay_buffer_capacity)
replay_observer = [replay_buffer.add_batch]
eval_py_policy = py_tf_policy.PyTFPolicy(tf_agent.policy)
train_metrics = [
tf_metrics.NumberOfEpisodes(),
tf_metrics.EnvironmentSteps(),
tf_py_metric.TFPyMetric(py_metrics.AverageReturnMetric()),
tf_py_metric.TFPyMetric(py_metrics.AverageEpisodeLengthMetric()),
]
collect_policy = tf_agent.collect_policy
initial_collect_op = dynamic_step_driver.DynamicStepDriver(
tf_env,
collect_policy,
observers=replay_observer + train_metrics,
num_steps=initial_collect_steps).run()
collect_op = dynamic_step_driver.DynamicStepDriver(
tf_env,
collect_policy,
observers=replay_observer + train_metrics,
num_steps=collect_steps_per_iteration).run()
// Prepare replay buffer as dataset with invalid transitions filtered.
def _filter_invalid_transition(trajectories, unused_arg1):
return ~trajectories.is_boundary()[0]
dataset = replay_buffer.as_dataset(
sample_batch_size=5 * batch_size,
num_steps=2).apply(tf.data.experimental.unbatch()).filter(
_filter_invalid_transition).batch(batch_size).prefetch(
batch_size * 5)
dataset_iterator = tf.compat.v1.data.make_initializable_iterator(dataset)
trajectories, unused_info = dataset_iterator.get_next()
train_op = tf_agent.train(trajectories)
for train_metric in train_metrics:
train_metric.tf_summaries(step_metrics=train_metrics[:2])
summary_op = tf.contrib.summary.all_summary_ops()
with eval_summary_writer.as_default(), \
tf.compat.v2.summary.record_if(True):
for eval_metric in eval_metrics:
eval_metric.tf_summaries()
In pattern: SUPERPATTERN
Frequency: 10
Non-data size: 14
Instances
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/sac/examples/train_eval_mujoco.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/dqn/examples/train_eval_rnn_gym.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/sac/examples/train_eval_mujoco.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/td3/examples/train_eval_mujoco.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/ddpg/examples/train_eval_mujoco.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/ddpg/examples/train_eval_rnn_dm.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/td3/examples/train_eval_rnn_dm.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/dqn/examples/train_eval_gym.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/reinforce/examples/train_eval_gym.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/ppo/examples/train_eval.py
Class Name:
Method Name: train_eval
Project Name: tensorflow/agents
Commit Name: f72a9854c23f9101e75cf7c13fbf8232128a896a
Time: 2019-02-27
Author: gjn@google.com
File Name: tf_agents/agents/dqn/examples/train_eval_atari.py
Class Name: TrainEval
Method Name: __init__