6a0d879dd254dcf5ccac86ac9958e203ddb4e1c9,agents/reinforce.py,REINFORCEContinuous,build_network_normal,#REINFORCEContinuous#,183
Before Change
inputs=self.states,
num_outputs=self.config["n_hidden_units"],
activation_fn=tf.tanh,
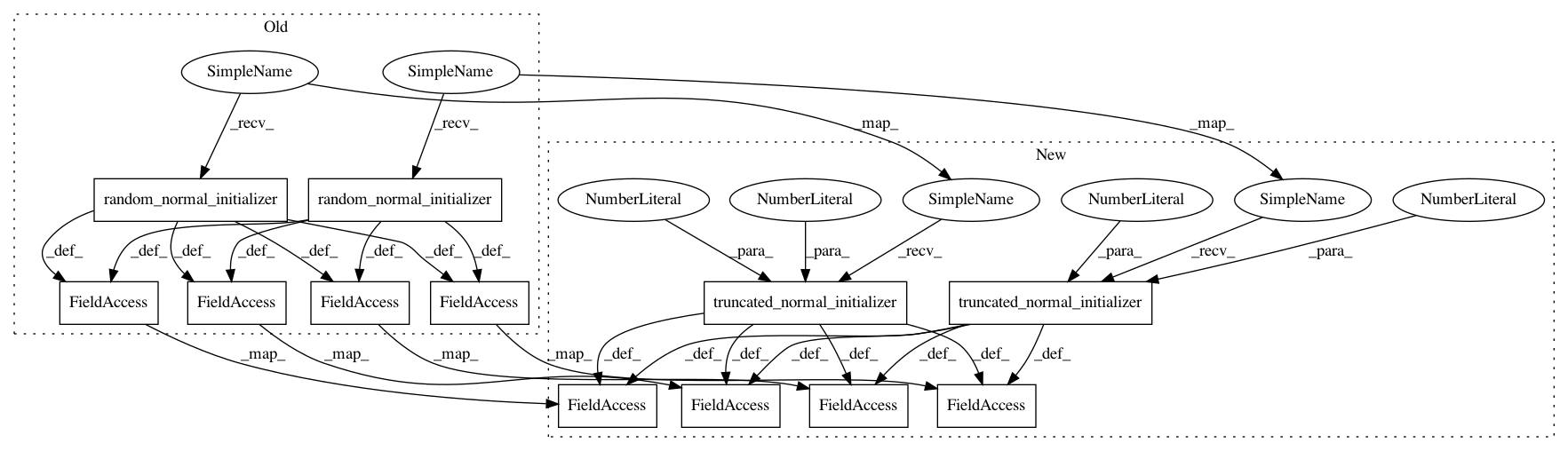
weights_initializer=tf.random_normal_initializer(),
biases_initializer=tf.zeros_initializer())
mu = tf.contrib.layers.fully_connected(
inputs=L1,
num_outputs=1,
activation_fn=None,
weights_initializer=tf.random_normal_initializer(),
biases_initializer=tf.zeros_initializer())
mu = tf.squeeze(mu, name="mu")
sigma_L1 = tf.contrib.layers.fully_connected(
inputs=self.states,
num_outputs=self.config["n_hidden_units"],
activation_fn=tf.tanh,
weights_initializer=tf.random_normal_initializer(),
biases_initializer=tf.zeros_initializer())
sigma = tf.contrib.layers.fully_connected(
inputs=sigma_L1,
num_outputs=1,
activation_fn=None,
weights_initializer=tf.random_normal_initializer(),
biases_initializer=tf.zeros_initializer())
sigma = tf.squeeze(sigma)
sigma = tf.nn.softplus(sigma) + 1e-5
self.normal_dist = tf.contrib.distributions.Normal(mu, sigma)
self.action = self.normal_dist.sample(1)
self.action = tf.clip_by_value(self.action, self.env.action_space.low[0], self.env.action_space.high[0])
loss = -self.normal_dist.log_prob(self.a_n) * self.adv_n
// Add cross entropy cost to encourage exploration
loss -= 1e-1 * self.normal_dist.entropy()
loss = tf.clip_by_value(loss, -1e10, 1e10)
self.summary_loss = tf.reduce_mean(loss)
// optimizer = tf.train.RMSPropOptimizer(learning_rate=self.config["learning_rate"], decay=0.9, epsilon=1e-9)
optimizer = tf.train.AdamOptimizer(learning_rate=self.config["learning_rate"])
self.train = optimizer.minimize(loss, global_step=tf.contrib.framework.get_global_step())
After Change
inputs=self.states,
num_outputs=self.config["n_hidden_units"],
activation_fn=tf.tanh,
weights_initializer=tf.truncated_normal_initializer(mean=0.0, stddev=0.02),
biases_initializer=tf.zeros_initializer())
mu = tf.contrib.layers.fully_connected(
inputs=L1,
num_outputs=1,
activation_fn=None,
weights_initializer=tf.truncated_normal_initializer(mean=0.0, stddev=0.02),
biases_initializer=tf.zeros_initializer())
mu = tf.squeeze(mu, name="mu")
sigma_L1 = tf.contrib.layers.fully_connected(
inputs=self.states,
num_outputs=self.config["n_hidden_units"],
activation_fn=tf.tanh,
weights_initializer=tf.truncated_normal_initializer(mean=0.0, stddev=0.02),
biases_initializer=tf.zeros_initializer())
sigma = tf.contrib.layers.fully_connected(
inputs=sigma_L1,
num_outputs=1,
activation_fn=None,
weights_initializer=tf.truncated_normal_initializer(mean=0.0, stddev=0.02),
biases_initializer=tf.zeros_initializer())
sigma = tf.squeeze(sigma)
sigma = tf.nn.softplus(sigma) + 1e-5
self.normal_dist = tf.contrib.distributions.Normal(mu, sigma)
self.action = self.normal_dist.sample(1)
self.action = tf.clip_by_value(self.action, self.env.action_space.low[0], self.env.action_space.high[0])
loss = -self.normal_dist.log_prob(self.a_n) * self.adv_n
// Add cross entropy cost to encourage exploration
loss -= 1e-1 * self.normal_dist.entropy()
loss = tf.clip_by_value(loss, -1e10, 1e10)
self.summary_loss = tf.reduce_mean(loss)
// optimizer = tf.train.RMSPropOptimizer(learning_rate=self.config["learning_rate"], decay=0.9, epsilon=1e-9)
optimizer = tf.train.AdamOptimizer(learning_rate=self.config["learning_rate"])
self.train = optimizer.minimize(loss, global_step=tf.contrib.framework.get_global_step())
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 12
Instances
Project Name: arnomoonens/yarll
Commit Name: 6a0d879dd254dcf5ccac86ac9958e203ddb4e1c9
Time: 2017-06-02
Author: x-006@hotmail.com
File Name: agents/reinforce.py
Class Name: REINFORCEContinuous
Method Name: build_network_normal
Project Name: arnomoonens/yarll
Commit Name: 6a0d879dd254dcf5ccac86ac9958e203ddb4e1c9
Time: 2017-06-02
Author: x-006@hotmail.com
File Name: agents/reinforce.py
Class Name: REINFORCEContinuous
Method Name: build_network_rnn
Project Name: arnomoonens/yarll
Commit Name: 6a0d879dd254dcf5ccac86ac9958e203ddb4e1c9
Time: 2017-06-02
Author: x-006@hotmail.com
File Name: agents/reinforce.py
Class Name: REINFORCEContinuous
Method Name: build_network_normal
Project Name: arnomoonens/yarll
Commit Name: 6a0d879dd254dcf5ccac86ac9958e203ddb4e1c9
Time: 2017-06-02
Author: x-006@hotmail.com
File Name: agents/a2c.py
Class Name: A2CDiscrete
Method Name: build_networks