171e9e18a10f2daea090bc6f4815db41072d66b6,ch10/03_pong_a2c_rollouts.py,,,#,115
Before Change
writer = SummaryWriter(comment="-pong-a2c-rollouts_" + args.name)
set_seed(20, envs, cuda=args.cuda)
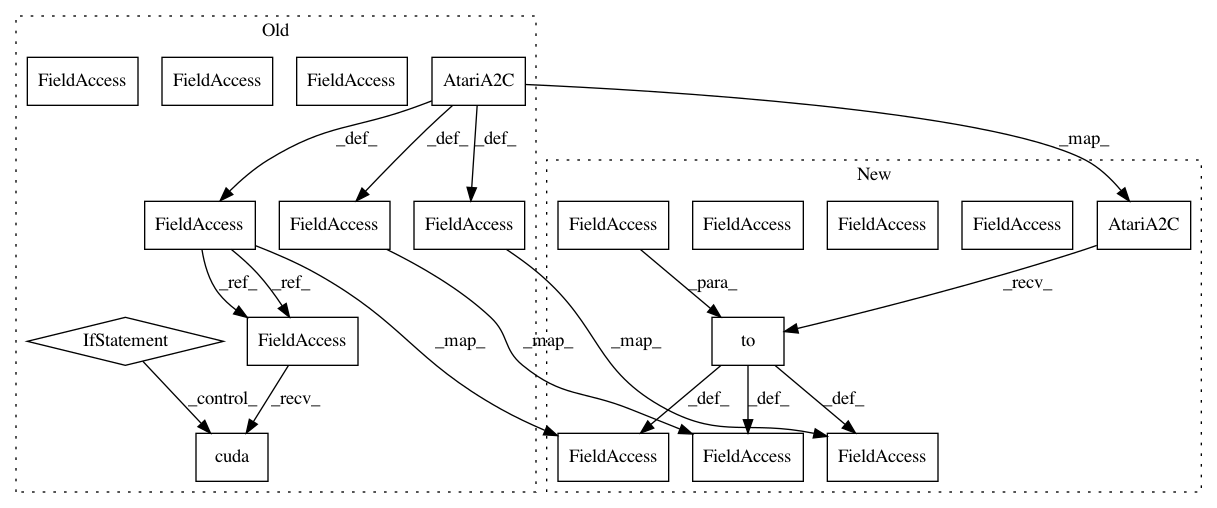
net = AtariA2C(envs[0].observation_space.shape, envs[0].action_space.n)
if args.cuda:
net.cuda()
print(net)
agent = ptan.agent.ActorCriticAgent(net, apply_softmax=True, cuda=args.cuda)
exp_source = ptan.experience.ExperienceSourceRollouts(envs, agent, gamma=GAMMA, steps_count=REWARD_STEPS)
optimizer = optim.RMSprop(net.parameters(), lr=LEARNING_RATE, eps=1e-5)
step_idx = 0
with common.RewardTracker(writer, stop_reward=18) as tracker:
with ptan.common.utils.TBMeanTracker(writer, batch_size=10) as tb_tracker:
for mb_states, mb_rewards, mb_actions, mb_values in exp_source:
// handle new rewards
new_rewards = exp_source.pop_total_rewards()
if new_rewards:
if tracker.reward(np.mean(new_rewards), step_idx):
break
optimizer.zero_grad()
states_v = Variable(torch.from_numpy(mb_states))
mb_adv = mb_rewards - mb_values
adv_v = Variable(torch.from_numpy(mb_adv))
actions_t = torch.from_numpy(mb_actions)
vals_ref_v = Variable(torch.from_numpy(mb_rewards))
if args.cuda:
states_v = states_v.cuda()
adv_v = adv_v.cuda()
actions_t = actions_t.cuda()
vals_ref_v = vals_ref_v.cuda()
logits_v, value_v = net(states_v)
loss_value_v = F.mse_loss(value_v, vals_ref_v)
log_prob_v = F.log_softmax(logits_v, dim=1)
log_prob_actions_v = adv_v * log_prob_v[range(len(mb_states)), actions_t]
loss_policy_v = -log_prob_actions_v.mean()
prob_v = F.softmax(logits_v, dim=1)
entropy_loss_v = (prob_v * log_prob_v).sum(dim=1).mean()
After Change
writer = SummaryWriter(comment="-pong-a2c-rollouts_" + args.name)
set_seed(20, envs, cuda=args.cuda)
net = AtariA2C(envs[0].observation_space.shape, envs[0].action_space.n).to(device)
print(net)
agent = ptan.agent.ActorCriticAgent(net, apply_softmax=True, device=device)
exp_source = ptan.experience.ExperienceSourceRollouts(envs, agent, gamma=GAMMA, steps_count=REWARD_STEPS)
optimizer = optim.RMSprop(net.parameters(), lr=LEARNING_RATE, eps=1e-5)
step_idx = 0
with common.RewardTracker(writer, stop_reward=18) as tracker:
with ptan.common.utils.TBMeanTracker(writer, batch_size=10) as tb_tracker:
for mb_states, mb_rewards, mb_actions, mb_values in exp_source:
// handle new rewards
new_rewards = exp_source.pop_total_rewards()
if new_rewards:
if tracker.reward(np.mean(new_rewards), step_idx):
break
optimizer.zero_grad()
states_v = torch.FloatTensor(mb_states).to(device)
mb_adv = mb_rewards - mb_values
adv_v = torch.FloatTensor(mb_adv).to(device)
actions_t = torch.LongTensor(mb_actions).to(device)
vals_ref_v = torch.FloatTensor(mb_rewards).to(device)
logits_v, value_v = net(states_v)
loss_value_v = F.mse_loss(value_v.squeeze(-1), vals_ref_v)
log_prob_v = F.log_softmax(logits_v, dim=1)
log_prob_actions_v = adv_v * log_prob_v[range(len(mb_states)), actions_t]
loss_policy_v = -log_prob_actions_v.mean()
prob_v = F.softmax(logits_v, dim=1)
entropy_loss_v = (prob_v * log_prob_v).sum(dim=1).mean()
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 19
Instances
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 171e9e18a10f2daea090bc6f4815db41072d66b6
Time: 2018-04-27
Author: max.lapan@gmail.com
File Name: ch10/03_pong_a2c_rollouts.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 171e9e18a10f2daea090bc6f4815db41072d66b6
Time: 2018-04-27
Author: max.lapan@gmail.com
File Name: ch10/02_pong_a2c.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 9e80c11073af48db2876fc943df9264a7ab0488e
Time: 2018-04-29
Author: max.lapan@gmail.com
File Name: ch11/01_a3c_data.py
Class Name:
Method Name: