be35334890f7669d7fc61764878b3787f5f79c75,mushroom_rl/environments/mujoco_envs/humanoid_gait/humanoid_gait.py,HumanoidGait,__init__,#HumanoidGait#Any#Any#Any#Any#Any#Any#Any#Any#,22
Before Change
self.act_avg_window = act_avg_window
self.obs_avg_window = obs_avg_window
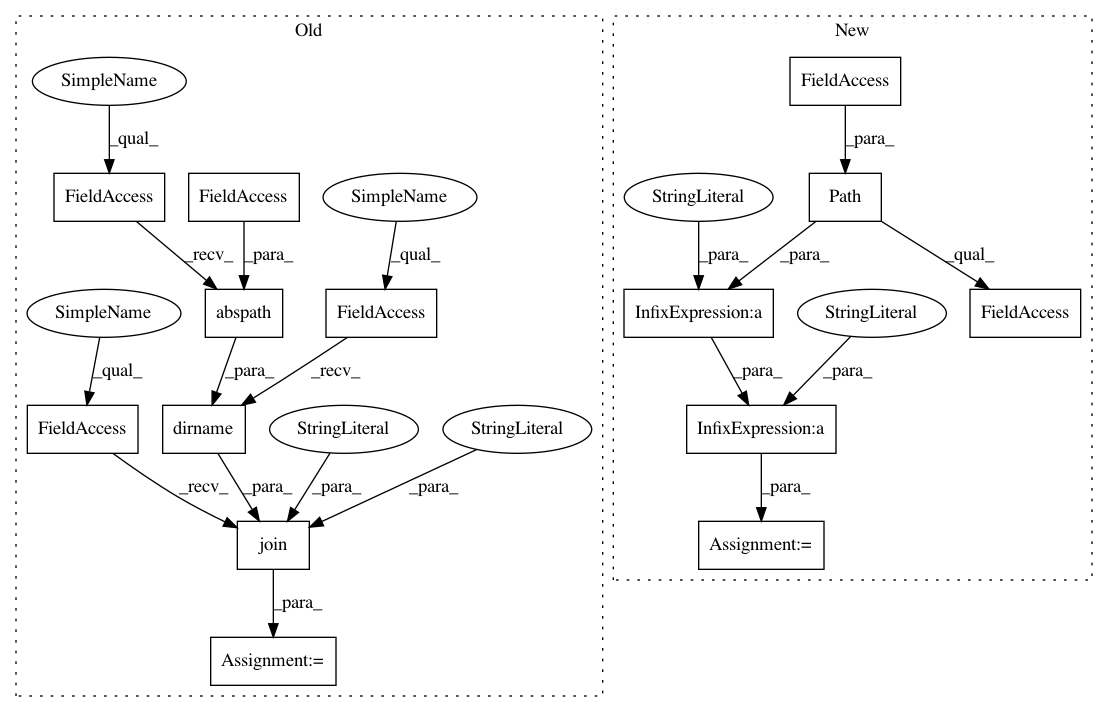
model_path = os.path.join(
os.path.dirname(os.path.abspath(__file__)).parent, "data",
"humanoid_gait", "human7segment.xml")
action_spec = ["right_hip_frontal", "right_hip_sagittal",
"right_knee", "right_ankle", "left_hip_frontal",
"left_hip_sagittal", "left_knee", "left_ankle",
After Change
self.act_avg_window = act_avg_window
self.obs_avg_window = obs_avg_window
model_path = Path(__file__).resolve().parent.parent / "data" / "humanoid_gait" / "human7segment.xml"
action_spec = ["right_hip_frontal", "right_hip_sagittal",
"right_knee", "right_ankle", "left_hip_frontal",
"left_hip_sagittal", "left_knee", "left_ankle",
In pattern: SUPERPATTERN
Frequency: 4
Non-data size: 14
Instances
Project Name: AIRLab-POLIMI/mushroom
Commit Name: be35334890f7669d7fc61764878b3787f5f79c75
Time: 2020-03-30
Author: boris.ilpossente@hotmail.it
File Name: mushroom_rl/environments/mujoco_envs/humanoid_gait/humanoid_gait.py
Class Name: HumanoidGait
Method Name: __init__
Project Name: snipsco/snips-nlu
Commit Name: 53b261a5a1fad07eaacef60e4861adaf0ec538f0
Time: 2018-07-09
Author: adrien.ball@snips.net
File Name: linting_test.py
Class Name:
Method Name:
Project Name: AIRLab-POLIMI/mushroom
Commit Name: be35334890f7669d7fc61764878b3787f5f79c75
Time: 2020-03-30
Author: boris.ilpossente@hotmail.it
File Name: mushroom_rl/environments/mujoco_envs/humanoid_gait/humanoid_gait.py
Class Name: HumanoidGait
Method Name: __init__
Project Name: theislab/scanpy
Commit Name: bcbc3d00e38f7f06c44c8e793fac8b2ce32e17a0
Time: 2019-06-03
Author: flying-sheep@web.de
File Name: scanpy/tests/test_read_10x.py
Class Name:
Method Name:
Project Name: AIRLab-POLIMI/mushroom
Commit Name: be35334890f7669d7fc61764878b3787f5f79c75
Time: 2020-03-30
Author: boris.ilpossente@hotmail.it
File Name: mushroom_rl/environments/mujoco_envs/ball_in_a_cup.py
Class Name: BallInACup
Method Name: __init__