cedecb35e3428985fd4efad738befeb75b9077f1,gym/envs/robotics/hand/manipulate_touch_sensors.py,HandPenTouchSensorsEnv,__init__,#HandPenTouchSensorsEnv#Any#Any#Any#Any#,121
Before Change
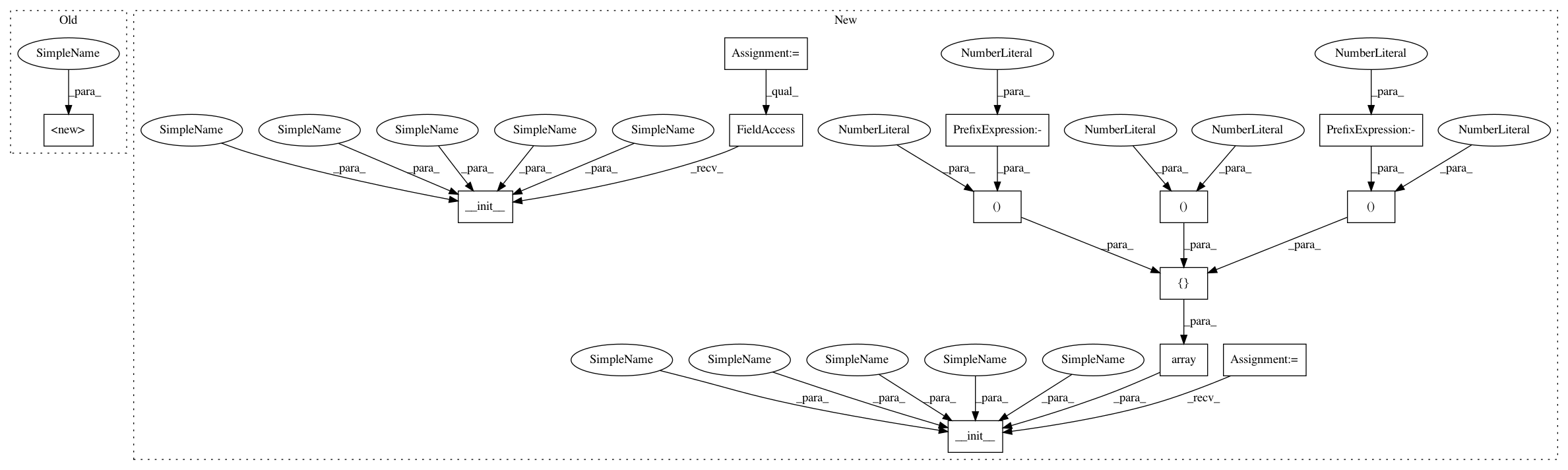
class HandPenTouchSensorsEnv(ManipulateTouchSensorsEnv):
def __init__(self, target_position="random", target_rotation="xyz", touch_get_obs="sensordata", reward_type="sparse"):
super(HandPenTouchSensorsEnv, self).__init__(
model_path=MANIPULATE_PEN_XML,
touch_get_obs=touch_get_obs,
target_rotation=target_rotation,
target_position=target_position,
target_position_range=np.array([(-0.04, 0.04), (-0.06, 0.02), (0.0, 0.06)]),
randomize_initial_rotation=False, reward_type=reward_type,
ignore_z_target_rotation=True, distance_threshold=0.05)
After Change
class HandPenTouchSensorsEnv(ManipulateTouchSensorsEnv, utils.EzPickle):
def __init__(self, target_position="random", target_rotation="xyz", touch_get_obs="sensordata", reward_type="sparse"):
utils.EzPickle.__init__(self, target_position, target_rotation, touch_get_obs, reward_type)
ManipulateTouchSensorsEnv.__init__(self,
model_path=MANIPULATE_PEN_XML,
touch_get_obs=touch_get_obs,
target_rotation=target_rotation,
target_position=target_position,
target_position_range=np.array([(-0.04, 0.04), (-0.06, 0.02), (0.0, 0.06)]),
randomize_initial_rotation=False, reward_type=reward_type,
ignore_z_target_rotation=True, distance_threshold=0.05)
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 13
Instances
Project Name: openai/gym
Commit Name: cedecb35e3428985fd4efad738befeb75b9077f1
Time: 2019-08-14
Author: peterzhokhoff@gmail.com
File Name: gym/envs/robotics/hand/manipulate_touch_sensors.py
Class Name: HandPenTouchSensorsEnv
Method Name: __init__
Project Name: openai/gym
Commit Name: cedecb35e3428985fd4efad738befeb75b9077f1
Time: 2019-08-14
Author: peterzhokhoff@gmail.com
File Name: gym/envs/robotics/hand/manipulate_touch_sensors.py
Class Name: HandBlockTouchSensorsEnv
Method Name: __init__
Project Name: openai/gym
Commit Name: cedecb35e3428985fd4efad738befeb75b9077f1
Time: 2019-08-14
Author: peterzhokhoff@gmail.com
File Name: gym/envs/robotics/hand/manipulate_touch_sensors.py
Class Name: HandEggTouchSensorsEnv
Method Name: __init__
Project Name: openai/gym
Commit Name: cedecb35e3428985fd4efad738befeb75b9077f1
Time: 2019-08-14
Author: peterzhokhoff@gmail.com
File Name: gym/envs/robotics/hand/manipulate_touch_sensors.py
Class Name: HandPenTouchSensorsEnv
Method Name: __init__