ebf39920ac018372b6f10b487c07feaaf7525fa4,flow/core/kernel/vehicle/aimsun.py,AimsunKernelVehicle,get_position,#AimsunKernelVehicle#Any#Any#,419
Before Change
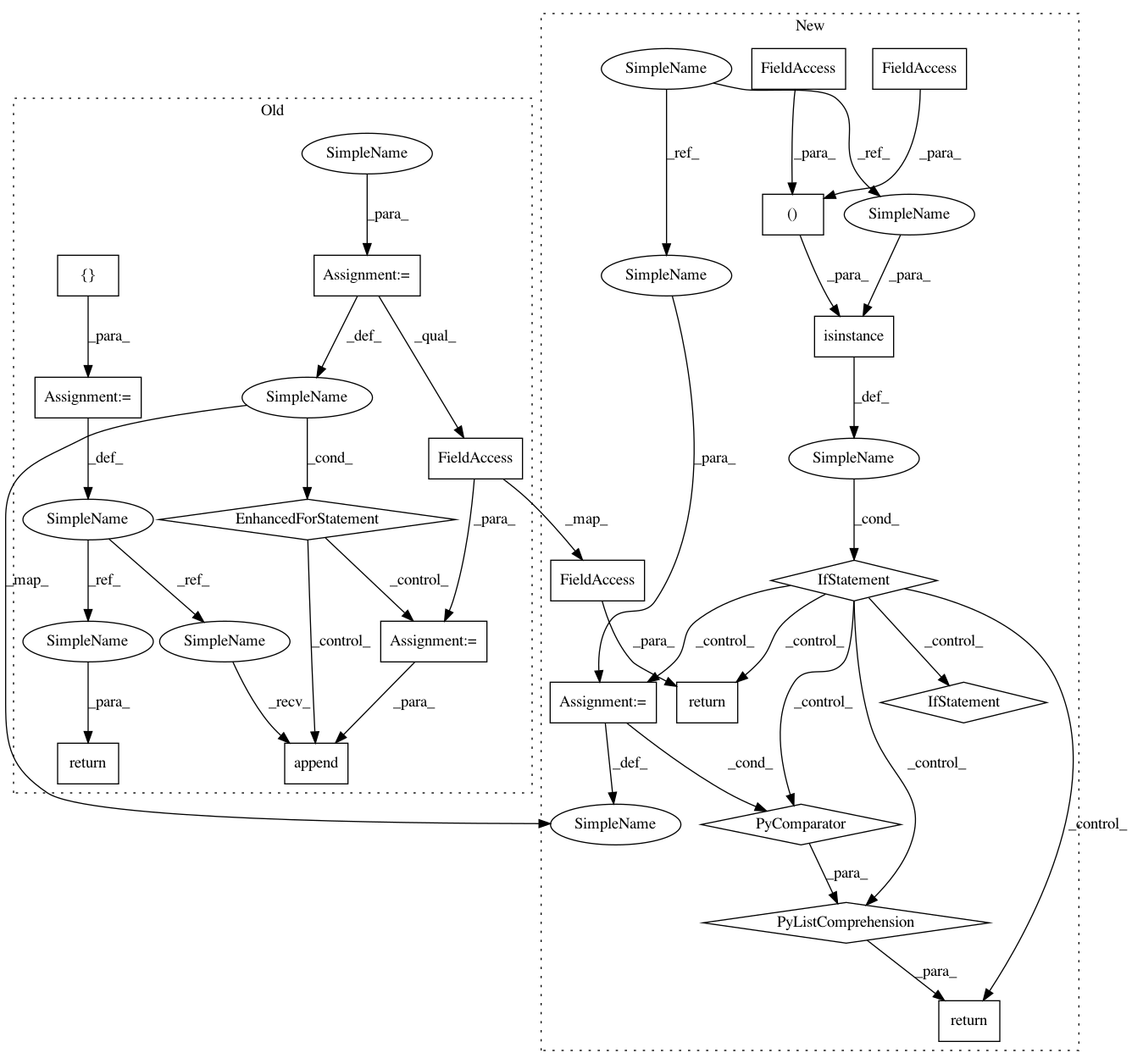
def get_position(self, veh_id, error=-1001):
See parent class.
// FIXME: do it the way we do, in case veh_id is not a list
positions = []
for veh in veh_id:
pos = self.__vehicles[veh]["tracking_info"].CurrentPos
positions.append(pos)
return positions
def get_position_world(self, veh_id, error=-1001):
Return the position of the vehicle relative to its current edge.
After Change
def get_position(self, veh_id, error=-1001):
See parent class.
if isinstance(veh_id, (list, np.ndarray)):
return [self.get_position(veh, error) for veh in veh_id]
return self.__vehicles[veh_id]["tracking_info"].CurrentPos
def get_position_world(self, veh_id, error=-1001):
Return the position of the vehicle relative to its current edge.
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 20
Instances
Project Name: flow-project/flow
Commit Name: ebf39920ac018372b6f10b487c07feaaf7525fa4
Time: 2018-12-24
Author: akreidieh@gmail.com
File Name: flow/core/kernel/vehicle/aimsun.py
Class Name: AimsunKernelVehicle
Method Name: get_position
Project Name: flow-project/flow
Commit Name: ebf39920ac018372b6f10b487c07feaaf7525fa4
Time: 2018-12-24
Author: akreidieh@gmail.com
File Name: flow/core/kernel/vehicle/aimsun.py
Class Name: AimsunKernelVehicle
Method Name: get_position
Project Name: flow-project/flow
Commit Name: ebf39920ac018372b6f10b487c07feaaf7525fa4
Time: 2018-12-24
Author: akreidieh@gmail.com
File Name: flow/core/kernel/vehicle/aimsun.py
Class Name: AimsunKernelVehicle
Method Name: get_speed
Project Name: flow-project/flow
Commit Name: ebf39920ac018372b6f10b487c07feaaf7525fa4
Time: 2018-12-24
Author: akreidieh@gmail.com
File Name: flow/core/kernel/vehicle/aimsun.py
Class Name: AimsunKernelVehicle
Method Name: get_lane