d5b0cd8e7960c247bb7c5b7c832358f8831780fb,ch15/03_train_trpo.py,,,#,90
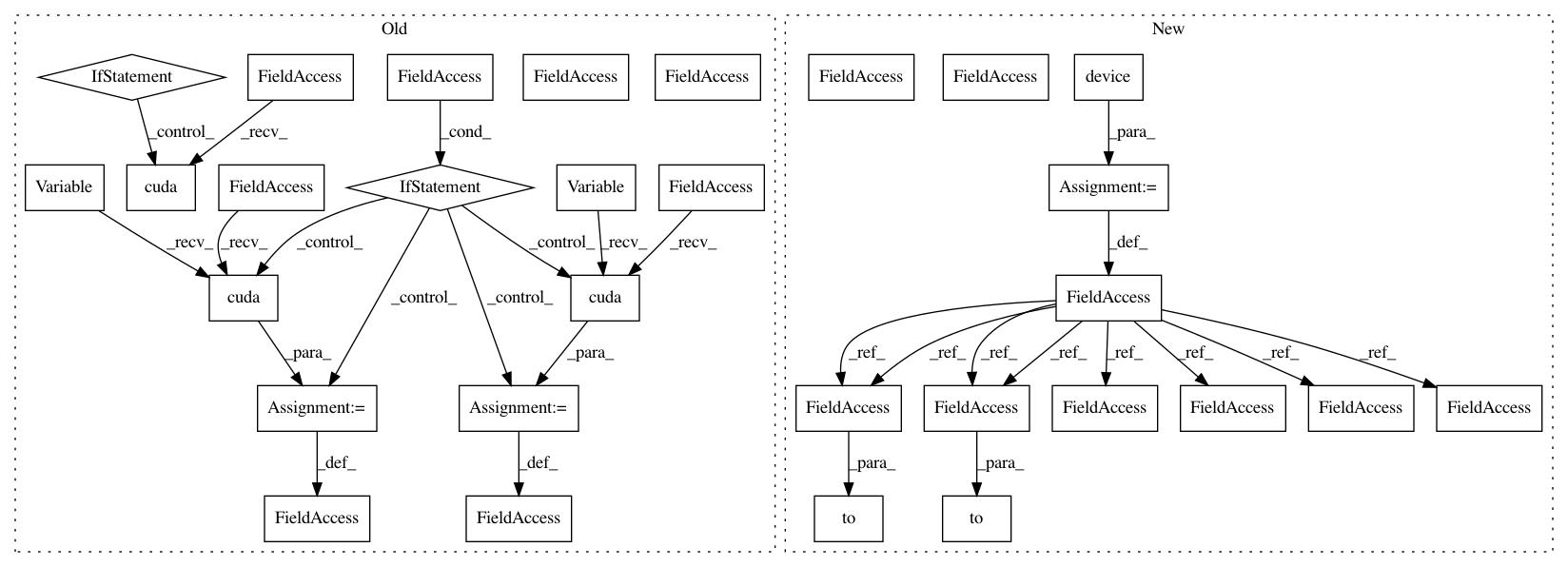
Before Change
net_act = model.ModelActor(env.observation_space.shape[0], env.action_space.shape[0])
net_crt = model.ModelCritic(env.observation_space.shape[0])
if args.cuda:
net_act.cuda()
net_crt.cuda()
print(net_act)
print(net_crt)
writer = SummaryWriter(comment="-trpo_" + args.name)
agent = model.AgentA2C(net_act, cuda=args.cuda)
exp_source = ptan.experience.ExperienceSource(env, agent, steps_count=1)
opt_crt = optim.Adam(net_crt.parameters(), lr=LEARNING_RATE_CRITIC)
trajectory = []
best_reward = None
with ptan.common.utils.RewardTracker(writer) as tracker:
for step_idx, exp in enumerate(exp_source):
rewards_steps = exp_source.pop_rewards_steps()
if rewards_steps:
rewards, steps = zip(*rewards_steps)
writer.add_scalar("episode_steps", np.mean(steps), step_idx)
tracker.reward(np.mean(rewards), step_idx)
if step_idx % TEST_ITERS == 0:
ts = time.time()
rewards, steps = test_net(net_act, test_env, cuda=args.cuda)
print("Test done in %.2f sec, reward %.3f, steps %d" % (
time.time() - ts, rewards, steps))
writer.add_scalar("test_reward", rewards, step_idx)
writer.add_scalar("test_steps", steps, step_idx)
if best_reward is None or best_reward < rewards:
if best_reward is not None:
print("Best reward updated: %.3f -> %.3f" % (best_reward, rewards))
name = "best_%+.3f_%d.dat" % (rewards, step_idx)
fname = os.path.join(save_path, name)
torch.save(net_act.state_dict(), fname)
best_reward = rewards
trajectory.append(exp)
if len(trajectory) < TRAJECTORY_SIZE:
continue
traj_states = [t[0].state for t in trajectory]
traj_actions = [t[0].action for t in trajectory]
traj_states_v = Variable(torch.from_numpy(np.array(traj_states, dtype=np.float32)))
traj_actions_v = Variable(torch.from_numpy(np.array(traj_actions, dtype=np.float32)))
if args.cuda:
traj_states_v = traj_states_v.cuda()
traj_actions_v = traj_actions_v.cuda()
traj_adv_v, traj_ref_v = calc_adv_ref(trajectory, net_crt, traj_states_v, cuda=args.cuda)
mu_v = net_act(traj_states_v)
old_logprob_v = calc_logprob(mu_v, net_act.logstd, traj_actions_v)
After Change
parser.add_argument("-n", "--name", required=True, help="Name of the run")
parser.add_argument("-e", "--env", default=ENV_ID, help="Environment id, default=" + ENV_ID)
args = parser.parse_args()
device = torch.device("cuda" if args.cuda else "cpu")
save_path = os.path.join("saves", "trpo-" + args.name)
os.makedirs(save_path, exist_ok=True)
env = gym.make(args.env)
test_env = gym.make(args.env)
net_act = model.ModelActor(env.observation_space.shape[0], env.action_space.shape[0]).to(device)
net_crt = model.ModelCritic(env.observation_space.shape[0]).to(device)
print(net_act)
print(net_crt)
writer = SummaryWriter(comment="-trpo_" + args.name)
agent = model.AgentA2C(net_act, device=device)
exp_source = ptan.experience.ExperienceSource(env, agent, steps_count=1)
opt_crt = optim.Adam(net_crt.parameters(), lr=LEARNING_RATE_CRITIC)
trajectory = []
best_reward = None
with ptan.common.utils.RewardTracker(writer) as tracker:
for step_idx, exp in enumerate(exp_source):
rewards_steps = exp_source.pop_rewards_steps()
if rewards_steps:
rewards, steps = zip(*rewards_steps)
writer.add_scalar("episode_steps", np.mean(steps), step_idx)
tracker.reward(np.mean(rewards), step_idx)
if step_idx % TEST_ITERS == 0:
ts = time.time()
rewards, steps = test_net(net_act, test_env, device=device)
print("Test done in %.2f sec, reward %.3f, steps %d" % (
time.time() - ts, rewards, steps))
writer.add_scalar("test_reward", rewards, step_idx)
writer.add_scalar("test_steps", steps, step_idx)
if best_reward is None or best_reward < rewards:
if best_reward is not None:
print("Best reward updated: %.3f -> %.3f" % (best_reward, rewards))
name = "best_%+.3f_%d.dat" % (rewards, step_idx)
fname = os.path.join(save_path, name)
torch.save(net_act.state_dict(), fname)
best_reward = rewards
trajectory.append(exp)
if len(trajectory) < TRAJECTORY_SIZE:
continue
traj_states = [t[0].state for t in trajectory]
traj_actions = [t[0].action for t in trajectory]
traj_states_v = torch.FloatTensor(traj_states).to(device)
traj_actions_v = torch.FloatTensor(traj_actions).to(device)
traj_adv_v, traj_ref_v = calc_adv_ref(trajectory, net_crt, traj_states_v, device=device)
mu_v = net_act(traj_states_v)
old_logprob_v = calc_logprob(mu_v, net_act.logstd, traj_actions_v)
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 30
Instances
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: d5b0cd8e7960c247bb7c5b7c832358f8831780fb
Time: 2018-04-29
Author: max.lapan@gmail.com
File Name: ch15/03_train_trpo.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: cbcc3f315c653706ceded6ba42f222616322a3f2
Time: 2018-04-25
Author: max.lapan@gmail.com
File Name: ch03/03_atari_gan.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: d5b0cd8e7960c247bb7c5b7c832358f8831780fb
Time: 2018-04-29
Author: max.lapan@gmail.com
File Name: ch15/03_train_trpo.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 1e9c3ee592be5e11dcce932a73009488d6f85474
Time: 2018-04-29
Author: max.lapan@gmail.com
File Name: ch17/02_imag.py
Class Name:
Method Name: