left = []
right = []
center_h = []
left_list = []
right_list = []
center_h_list = []
// If height is greater than 21 pixels make 20 increments (5% intervals)
if extent >= 21:
inc = int(extent / 21)
// Define variable for max points and min points
pts_max = []
pts_min = []
// Get max and min points for each of the intervals
for i in range(1, 21):
if i == 1:
pt_max = y
pt_min = y + (inc * i)
else:
pt_max = y + (inc * (i - 1))
pt_min = y + (inc * i)
// Put these in an array
pts_max.append(pt_max)
pts_min.append(pt_min)
// Combine max and min into a set of tuples
point_range = list(zip(pts_max, pts_min))
// define some list variables to fill
row_median = []
row_ave = []
max_width = []
left_points = []
right_points = []
y_vals = []
x_centroids = []
y_centroids = []
// For each of the 20 intervals
for pt in point_range:
// Get the lower and upper bounds
// (lower and higher in terms of value; low point is actually towards top of photo, higher is lower of photo)
low_point, high_point = pt
// Get all rows within these two points
rows = []
lps = []
rps = []
// Get a continuous list of the values between the top and the bottom of the interval save as vals
vals = list(range(low_point, high_point))
// For each row... get all coordinates from object contour that match row
for v in vals:
// Value is all entries that match the row
value = obj[v == obj[:, 0, 1]]
if len(value) > 0:
// Could potentially be more than two points in all contour in each pixel row
// Grab largest x coordinate (column)
largest = value[:, 0, 0].max()
// Grab smallest x coordinate (column)
smallest = value[:, 0, 0].min()
// Take the difference between the two (this is how far across the object is on this plane)
row_width = largest - smallest
// Append this value to a list
rows.append(row_width)
lps.append(smallest)
rps.append(largest)
if len(value) == 0:
row_width = 1
rows.append(row_width)
lps.append(1)
rps.append(1)
// For each of the points find the median and average width
row_median.append(np.median(np.array(rows)))
row_ave.append(np.mean(np.array(rows)))
max_width.append(np.max(np.array(rows)))
left_points.append(np.mean(smallest))
right_points.append(np.mean(largest))
yval = int((high_point + low_point) / 2)
y_vals.append(yval)
// Make a copy of the mask; we want to get landmark points from this
window = np.copy(mask)
window[:low_point] = 0
window[high_point:] = 0
s = cv2.moments(window)
// Centroid (center of mass x, center of mass y)
if largest - smallest > 3:
if s["m00"] > 0.001:
smx, smy = (s["m10"] / s["m00"], s["m01"] / s["m00"])
x_centroids.append(int(smx))
y_centroids.append(int(smy))
if s["m00"] < 0.001:
smx, smy = (s["m10"] / 0.001, s["m01"] / 0.001)
x_centroids.append(int(smx))
y_centroids.append(int(smy))
else:
smx = (largest + smallest) / 2
smy = yval
x_centroids.append(int(smx))
y_centroids.append(int(smy))
// Get the indicie of the largest median/average x-axis value (if there is a tie it takes largest index)
// indice_median = row_median.index(max(row_median))
// indice_ave = row_ave.index(max(row_ave))
// median_value = row_median[indice_median]
// ave_value = row_ave[indice_ave]
// max_value = max_width[indice_ave]
left = list(zip(left_points, y_vals))
left = np.array(left)
left.shape = (20, 1, 2)
right = list(zip(right_points, y_vals))
right = np.array(right)
right.shape = (20, 1, 2)
center_h = list(zip(x_centroids, y_centroids))
center_h = np.array(center_h)
center_h.shape = (20, 1, 2)
img2 = np.copy(img)
for i in left:
x = i[0, 0]
y = i[0, 1]
cv2.circle(img2, (int(x), int(y)), params.line_thickness, (255, 0, 0), -1)
for i in right:
x = i[0, 0]
y = i[0, 1]
cv2.circle(img2, (int(x), int(y)), params.line_thickness, (255, 0, 255), -1)
for i in center_h:
x = i[0, 0]
y = i[0, 1]
cv2.circle(img2, (int(x), int(y)), params.line_thickness, (0, 79, 255), -1)
if params.debug == "plot":
plot_image(img2)
elif params.debug == "print":
print_image(img2, os.path.join(params.debug_outdir, (str(params.device) + "_y_axis_pseudolandmarks.png")))
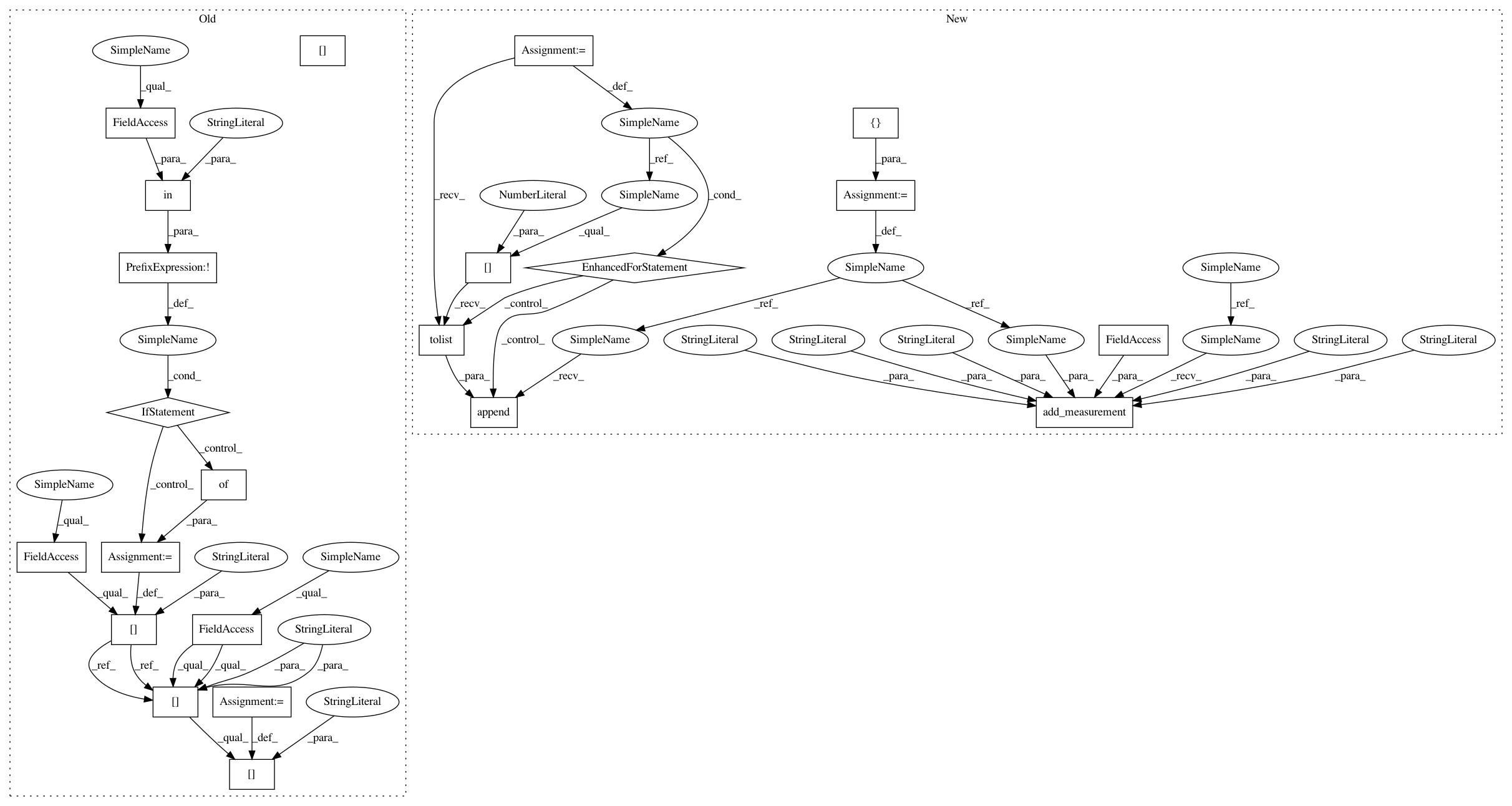
elif extent < 21:
// If the length of the object is less than 20 pixels just make the object a 20 pixel rectangle
x, y, width, height = cv2.boundingRect(obj)
y_coords = list(range(y, y + 20))
l_points = [x] * 20
left = list(zip(l_points, y_coords))
left = np.array(left)
left.shape = (20, 1, 2)
r_points = [x + width] * 20
right = list(zip(r_points, y_coords))
right = np.array(right)
right.shape = (20, 1, 2)
m = cv2.moments(mask, binaryImage=True)
// Centroid (center of mass x, center of mass y)
if m["m00"] == 0:
fatal_error("Check input parameters, first moment=0")
else:
cmx, cmy = (m["m10"] / m["m00"], m["m01"] / m["m00"])
c_points = [cmx] * 20
center_h = list(zip(c_points, y_coords))
center_h = np.array(center_h)
center_h.shape = (20, 1, 2)
img2 = np.copy(img)
for i in left:
x = i[0, 0]
y = i[0, 1]
cv2.circle(img2, (int(x), int(y)), params.line_thickness, (255, 0, 0), -1)
for i in right:
x = i[0, 0]
y = i[0, 1]
cv2.circle(img2, (int(x), int(y)), params.line_thickness, (255, 0, 255), -1)
for i in center_h:
x = i[0, 0]
y = i[0, 1]
cv2.circle(img2, (int(x), int(y)), params.line_thickness, (0, 79, 255), -1)
// print_image(img2, (str(device) + "_y_axis_pseudolandmarks.png"))
if params.debug == "plot":
plot_image(img2)
elif params.debug == "print":
print_image(img2, os.path.join(params.debug_outdir, (str(params.device) + "_y_axis_pseudolandmarks.png")))
// Store into global measurements
for pt in left:
left_list.append(pt[0].tolist())
for pt in right:
right_list.append(pt[0].tolist())
for pt in center_h:
center_h_list.append(pt[0].tolist())
outputs.add_measurement(variable="left_lmk", trait="left landmark coordinates",
method="plantcv.plantcv.x_axis_pseudolandmarks", scale="none", datatype=list,
value=left_list, label="none")
outputs.add_measurement(variable="right_lmk", trait="right landmark coordinates",
method="plantcv.plantcv.x_axis_pseudolandmarks", scale="none", datatype=list,
value=right_list, label="none")
outputs.add_measurement(variable="center_h_lmk", trait="center horizontal landmark coordinates",