@classmethod
def odot(cls, p, **kwargs):
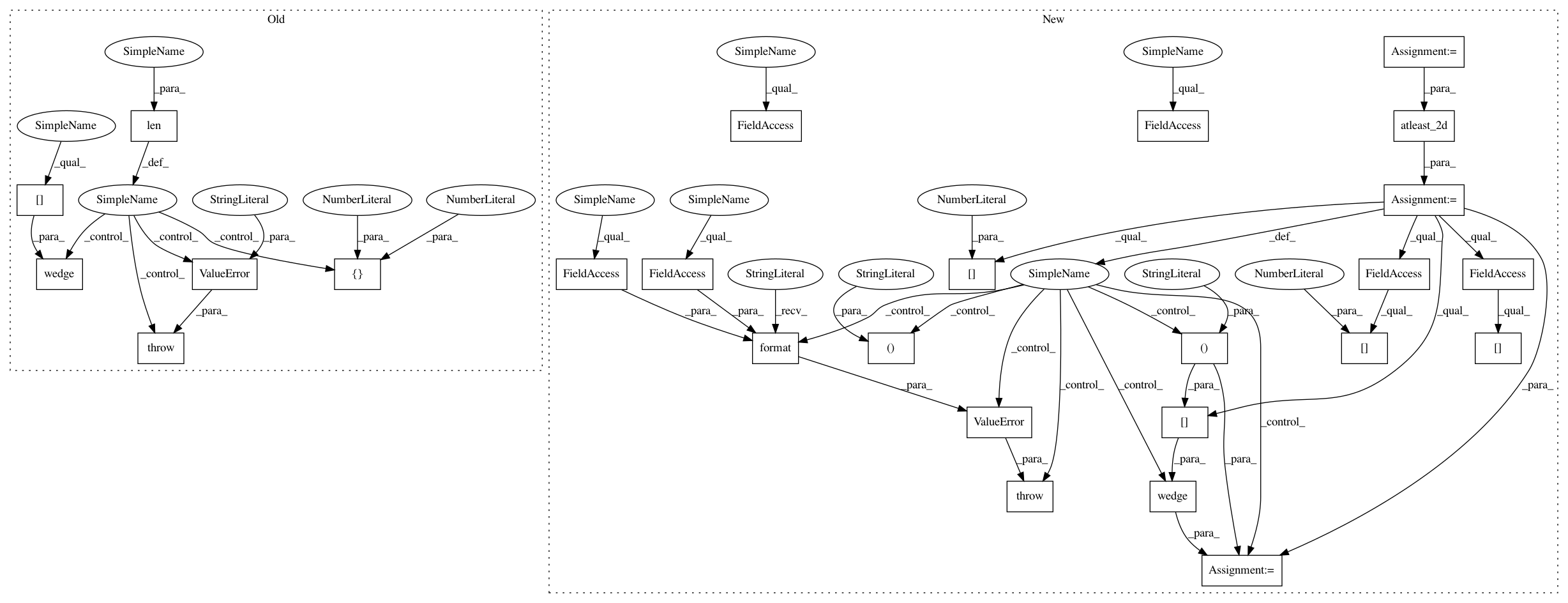
SE(3) \odot operator as defined by Barfoot.
if len(p) == cls.dim - 1:
result = np.zeros([3, 6])
// Assume scale parameter is 1 unless otherwise p is a direction
// vector, in which case the scale is 0
scale_is_zero = kwargs.get("directional", False)
if not scale_is_zero:
result[0:3, 0:3] = np.eye(3)
result[0:3, 3:6] = -SO3.wedge(p)
return result
elif len(p) == cls.dim:
result = np.zeros([4, 6])
result[0:3, 0:3] = p[3] * np.eye(3)
result[0:3, 3:6] = -SO3.wedge(p[0:3])
return result
else:
raise ValueError("p must have dimension 3 or 4")
@classmethod
def vee(cls, Xi):
SE(3) vee operator as defined by Barfoot.