349cb5e0294fbba76e252bbd9026eb40a4651ae9,softlearning/environments/rllab/pusher_2d_env.py,ForkReacherEnv,reset,#ForkReacherEnv#Any#,232
Before Change
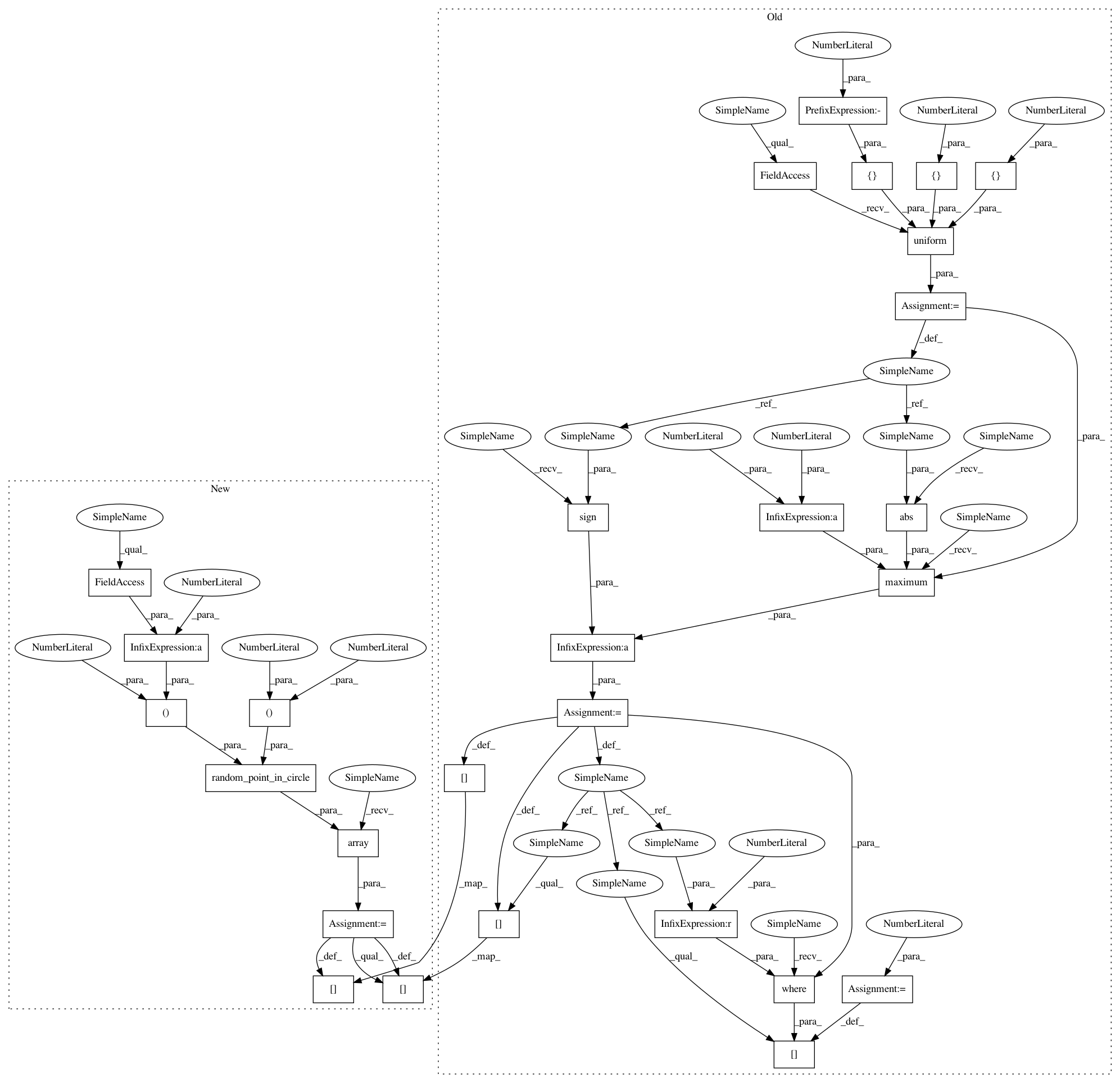
qpos[self.JOINT_INDS[2]] = np.random.uniform(
-np.pi/2, np.pi/2) + np.pi/2
target_pos = np.random.uniform([-1.0], [1.0], size=[2])
target_pos = np.sign(target_pos) * np.maximum(np.abs(target_pos), 1/2)
target_pos[np.where(target_pos == 0)] = 1.0
target_pos[1] += 1.0
qpos[self.TARGET_INDS] = target_pos
// qpos[self.TARGET_INDS] = [1.0, 2.0]
// qpos[self.TARGET_INDS] = self.init_qpos.squeeze()[self.TARGET_INDS]
After Change
qpos[self.JOINT_INDS[2]] = np.random.uniform(
-np.pi/2, np.pi/2) + np.pi/2
target_position = np.array(random_point_in_circle(
angle_range=(0, 2*np.pi), radius=(0.6, 1.2)))
target_position[1] += 1.0
qpos[self.TARGET_INDS] = target_position
// qpos[self.TARGET_INDS] = [1.0, 2.0]
// qpos[self.TARGET_INDS] = self.init_qpos.squeeze()[self.TARGET_INDS]
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 28
Instances
Project Name: rail-berkeley/softlearning
Commit Name: 349cb5e0294fbba76e252bbd9026eb40a4651ae9
Time: 2018-08-04
Author: kristian.hartikainen@gmail.com
File Name: softlearning/environments/rllab/pusher_2d_env.py
Class Name: ForkReacherEnv
Method Name: reset
Project Name: rail-berkeley/softlearning
Commit Name: 349cb5e0294fbba76e252bbd9026eb40a4651ae9
Time: 2018-08-04
Author: kristian.hartikainen@gmail.com
File Name: softlearning/environments/rllab/pusher_2d_env.py
Class Name: ForkReacherEnv
Method Name: reset
Project Name: rail-berkeley/softlearning
Commit Name: 6907e92d697810c1fcd4bc2054b2515f991e1cbf
Time: 2018-08-04
Author: kristian.hartikainen@gmail.com
File Name: softlearning/environments/rllab/image_pusher.py
Class Name: ImageForkReacherEnv
Method Name: reset
Project Name: rail-berkeley/softlearning
Commit Name: 6907e92d697810c1fcd4bc2054b2515f991e1cbf
Time: 2018-08-04
Author: kristian.hartikainen@gmail.com
File Name: softlearning/environments/gym/mujoco/image_pusher.py
Class Name: ImageForkReacherEnv
Method Name: reset_model