dedc529d98ff3a6c82ffdf3baddb9a9edf569dc4,ch06/01_dqn_pong.py,,,#,207
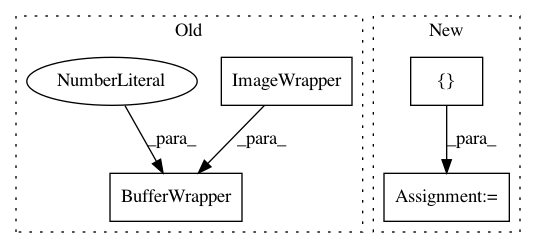
Before Change
writer = SummaryWriter(comment="-pong")
env = BufferWrapper(ImageWrapper(gym.make("PongNoFrameskip-v4")), n_steps=4)
test_env = BufferWrapper(ImageWrapper( gym.make("PongNoFrameskip-v4")), n_steps=4)
// test_env = gym.wrappers.Monitor(test_env, "records", force=True)
net = DQN(env.observation_space.shape, env.action_space.n)
tgt_net = TargetNet(net, cuda=args.cuda)After Change
net.cuda()
print("Populate buffer with %d steps" % REPLAY_START_SIZE)
episode_rewards = []
for _ in range(REPLAY_START_SIZE):
rw = agent.play_step(None, epsilon=1.0)
if rw is not None:
episode_rewards.append(rw)In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 4
Instances Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: dedc529d98ff3a6c82ffdf3baddb9a9edf569dc4
Time: 2017-10-19
Author: max.lapan@gmail.com
File Name: ch06/01_dqn_pong.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: a0113631d7e9d6ec65531457ce03e06c902a4d0b
Time: 2017-10-17
Author: max.lapan@gmail.com
File Name: ch06/01_dqn_pong.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 3bb0fd78af4f9dbddf7c01dde71844a283099650
Time: 2017-10-16
Author: max.lapan@gmail.com
File Name: ch06/01_dqn_pong.py
Class Name:
Method Name: