2d52ff5060a635582dd416584beb11582ea58c5b,donkey/parts/actuators/actuators.py,PCA9685,run,#PCA9685#Any#,26
Before Change
self.channel = channel
def run(self, pulse):
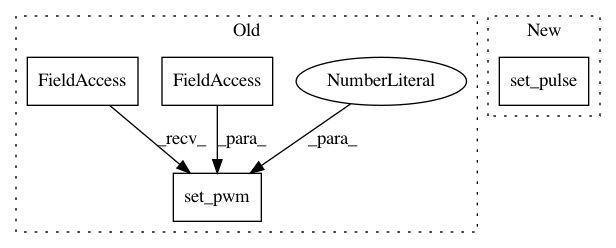
self.pwm.set_pwm(self.channel, 0, pulse)
After Change
self.pwm.set_pwm(self.channel, 0, pulse)
def run(self, pulse):
self.set_pulse(pulse)
class PWMSteering:
In pattern: SUPERPATTERN
Frequency: 4
Non-data size: 4
Instances
Project Name: autorope/donkeycar
Commit Name: 2d52ff5060a635582dd416584beb11582ea58c5b
Time: 2017-07-08
Author: wroscoe@gmail.com
File Name: donkey/parts/actuators/actuators.py
Class Name: PCA9685
Method Name: run
Project Name: autorope/donkeycar
Commit Name: 41b9c816682228e7b3330543de4834dc910c450c
Time: 2017-02-01
Author: wroscoe@gmail.com
File Name: donkey/actuators.py
Class Name: PWMThrottleActuator
Method Name: calibrate
Project Name: autorope/donkeycar
Commit Name: 41b9c816682228e7b3330543de4834dc910c450c
Time: 2017-02-01
Author: wroscoe@gmail.com
File Name: donkey/actuators.py
Class Name: PWMThrottleActuator
Method Name: update
Project Name: autorope/donkeycar
Commit Name: 41b9c816682228e7b3330543de4834dc910c450c
Time: 2017-02-01
Author: wroscoe@gmail.com
File Name: donkey/actuators.py
Class Name: PWMSteeringActuator
Method Name: update