cov = Km - Asq
if pred_noise:
cov += sigma * np.eye(cov.shape)
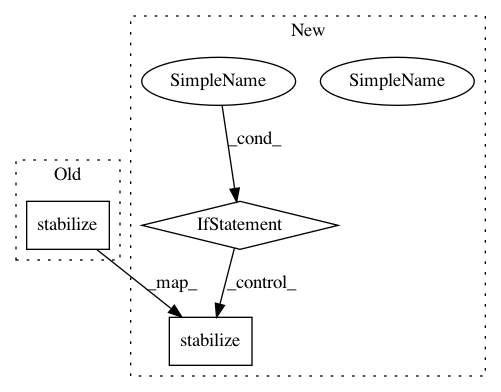
return mu, stabilize(cov)
def conditional(self, name, Xnew, pred_noise=False, **kwargs):
Returns the conditional distribution evaluated over new input
After Change
cov = Km - Asq
if pred_noise:
cov += sigma * np.eye(cov.shape)
return mu, cov if pred_noise else stabilize(cov)
def conditional(self, name, Xnew, pred_noise=False, **kwargs):
Returns the conditional distribution evaluated over new input