b2aad723220e31bc8e950c112b557732b608b97a,PyPi/environments/car_on_hill.py,CarOnHill,__init__,#CarOnHill#,14
Before Change
self._dt = .1
// MDP initialization
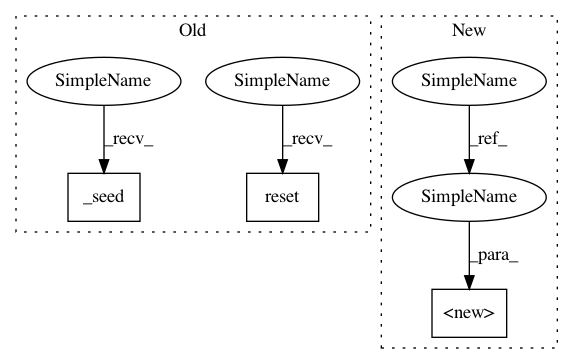
self._seed()
self.reset()
def _seed(self, seed=None):
self.np_random, seed = seeding.np_random(seed)
return [seed]
After Change
The Car On Hill environment as presented in:
"Tree-Based Batch Mode Reinforcement Learning, D. Ernst et. al."
def __init__(self):
self.__name__ = "CarOnHill"
// MDP spaces
self.max_pos = 1.
self.max_velocity = 3.
high = np.array([self.max_pos, self.max_velocity])
self.observation_space = spaces.Box(low=-high, high=high)
self.action_space = spaces.Discrete(values=(-4., 4.))
// MDP parameters
self.horizon = 100
self.gamma = 0.95
// MDP properties
self._g = 9.81
self._m = 1
self._dt = .1
super(CarOnHill, self).__init__()
def reset(self, state=None):
if state is None:
self._state = np.array([-0.5, 0])
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 3
Instances
Project Name: AIRLab-POLIMI/mushroom
Commit Name: b2aad723220e31bc8e950c112b557732b608b97a
Time: 2017-06-04
Author: carlo.deramo@gmail.com
File Name: PyPi/environments/car_on_hill.py
Class Name: CarOnHill
Method Name: __init__
Project Name: AIRLab-POLIMI/mushroom
Commit Name: b2aad723220e31bc8e950c112b557732b608b97a
Time: 2017-06-04
Author: carlo.deramo@gmail.com
File Name: PyPi/environments/grid_world.py
Class Name: GridWorldVanHasselt
Method Name: __init__
Project Name: AIRLab-POLIMI/mushroom
Commit Name: b2aad723220e31bc8e950c112b557732b608b97a
Time: 2017-06-04
Author: carlo.deramo@gmail.com
File Name: PyPi/environments/grid_world.py
Class Name: GridWorld
Method Name: __init__