6ffa2565679f434dea6667e825f12630e9dbf96b,thinc/neural/_lsuv.py,,LSUVinit,#Any#Any#Any#,37
Before Change
model = model._layers[0]
if model.name in "softmax": // pragma: no cover
return
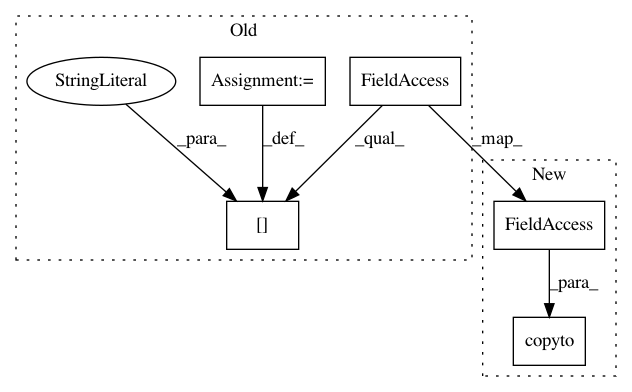
model.W[:] = svd_orthonormal(model.W.shape)
acts = model(X)
tol_var = 0.1
t_max = 10
t_i = 0
After Change
model = model._layers[0]
if model.name in "softmax": // pragma: no cover
return
copyto(model.W, svd_orthonormal(model.W.shape))
acts = model(X)
tol_var = 0.1
t_max = 10
t_i = 0
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 5
Instances
Project Name: explosion/thinc
Commit Name: 6ffa2565679f434dea6667e825f12630e9dbf96b
Time: 2017-01-29
Author: honnibal+gh@gmail.com
File Name: thinc/neural/_lsuv.py
Class Name:
Method Name: LSUVinit
Project Name: deepmind/dm_control
Commit Name: 26ebe68b47b4d1aa076d6aed28ce43eb420a9005
Time: 2019-04-12
Author: alimuldal@google.com
File Name: dm_control/mujoco/engine.py
Class Name: MovableCamera
Method Name: set_pose
Project Name: deepmind/dm_control
Commit Name: 41eef65be1ff72b4f7f9acc8a3c4862fc46abd36
Time: 2019-04-12
Author: alimuldal@google.com
File Name: dm_control/mujoco/engine.py
Class Name: Physics
Method Name: set_control