627435f7b4c426e6bf66702f129bb7ef48a87b34,example.py,,editor_example,#,146
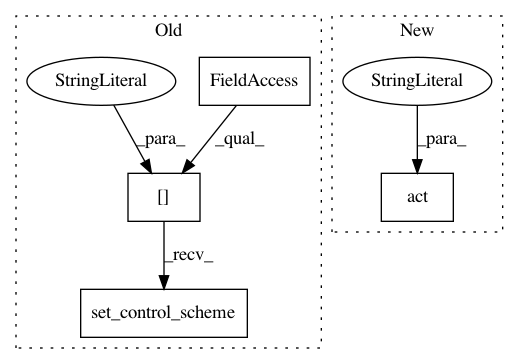
Before Change
sensors = [Sensors.RGB_CAMERA, Sensors.LOCATION_SENSOR, Sensors.VELOCITY_SENSOR]
agent = AgentDefinition("uav0", agents.UavAgent, sensors)
env = HolodeckEnvironment(agent, start_world=False)
env.agents["uav0"].set_control_scheme(1)
command = [0, 0, 10, 50]
for i in range(10):
env.reset()
After Change
env.reset()
_ = env.act("turtle0", command)
_ = env.act("turtle1", command)
_ = env.act("turtle2", command)
_ = env.act("turtle3", command)
_ = env.act("turtle4", command)
for _ in range(10000):
states = env.tick()
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 4
Instances
Project Name: BYU-PCCL/holodeck
Commit Name: 627435f7b4c426e6bf66702f129bb7ef48a87b34
Time: 2019-01-10
Author: maxdrob1@gmail.com
File Name: example.py
Class Name:
Method Name: editor_example
Project Name: BYU-PCCL/holodeck
Commit Name: b6c75018f5942cb58a38f40837ff3a03c8be4eda
Time: 2018-11-10
Author: nickwalton00@gmail.com
File Name: example.py
Class Name:
Method Name: editor_example
Project Name: BYU-PCCL/holodeck
Commit Name: f8fa02f669cd28fce75d7fd102cd64c30a362f8e
Time: 2019-05-14
Author: maxdrob1@gmail.com
File Name: example.py
Class Name:
Method Name: multi_agent_example