f474956bedad1fd4acf976da85b29d479242b367,mushroom/environments/inverted_pendulum.py,InvertedPendulum,reset,#InvertedPendulum#Any#,57
Before Change
else:
self._state = state
self._state[0] = normalize_angle(self._state[0])
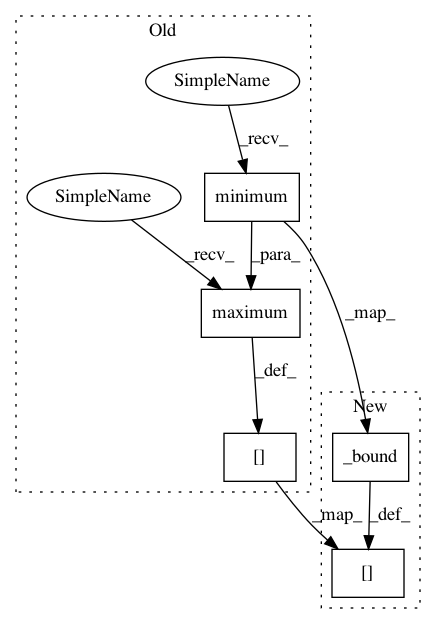
self._state[1] = np.maximum(-self._max_omega,
np.minimum(self._state[1],
self._max_omega))
return self._state
def step(self, action):
After Change
else:
self._state = state
self._state[0] = normalize_angle(self._state[0])
self._state[1] = self._bound(self._state[1],
-self._max_omega,self._max_omega)
return self._state
def step(self, action):
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 5
Instances
Project Name: AIRLab-POLIMI/mushroom
Commit Name: f474956bedad1fd4acf976da85b29d479242b367
Time: 2018-05-14
Author: boris.ilpossente@hotmail.it
File Name: mushroom/environments/inverted_pendulum.py
Class Name: InvertedPendulum
Method Name: reset
Project Name: AIRLab-POLIMI/mushroom
Commit Name: f474956bedad1fd4acf976da85b29d479242b367
Time: 2018-05-14
Author: boris.ilpossente@hotmail.it
File Name: mushroom/environments/inverted_pendulum.py
Class Name: InvertedPendulum
Method Name: step
Project Name: AIRLab-POLIMI/mushroom
Commit Name: f474956bedad1fd4acf976da85b29d479242b367
Time: 2018-05-14
Author: boris.ilpossente@hotmail.it
File Name: mushroom/environments/ship_steering.py
Class Name: ShipSteering
Method Name: step