ba54a88068c07af00b4cb26362788ee51af319be,flow/envs/lane_changing.py,SimpleLaneChangingAccelerationEnvironment,action_space,#SimpleLaneChangingAccelerationEnvironment#,20
Before Change
lateral direction the vehicle will take.
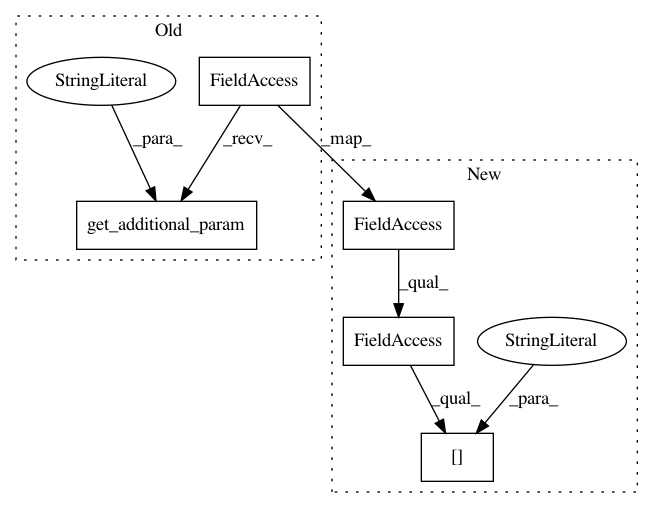
max_deacc = self.env_params.get_additional_param("max-deacc")
max_acc = self.env_params.get_additional_param("max-acc")
lb = [-abs(max_deacc), -1] * self.vehicles.num_rl_vehicles
ub = [max_acc, 1] * self.vehicles.num_rl_vehicles
return Box(np.array(lb), np.array(ub))
After Change
acc_action_space = Box(
low=-abs(self.env_params.additional_params["max-deacc"]),
high=self.env_params.additional_params["max-acc"],
shape=(self.vehicles.num_rl_vehicles,))
action_space = Tuple(
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 5
Instances
Project Name: flow-project/flow
Commit Name: ba54a88068c07af00b4cb26362788ee51af319be
Time: 2017-10-12
Author: akreidieh@gmail.com
File Name: flow/envs/lane_changing.py
Class Name: SimpleLaneChangingAccelerationEnvironment
Method Name: action_space
Project Name: flow-project/flow
Commit Name: 229ea0173f96c6ffd3db8b3a18067b8636f005c4
Time: 2018-04-20
Author: akreidieh@gmail.com
File Name: flow/envs/loop/loop_accel.py
Class Name: AccelEnv
Method Name: get_state
Project Name: flow-project/flow
Commit Name: b0e80fe56df8b34831f35f6f66dd2a6144653029
Time: 2018-02-08
Author: akreidieh@gmail.com
File Name: flow/envs/loop_accel.py
Class Name: AccelMAEnv
Method Name: compute_reward