"covariance": prior_values,
"process_noise": process_values,
"measurement_noise": obs_values}
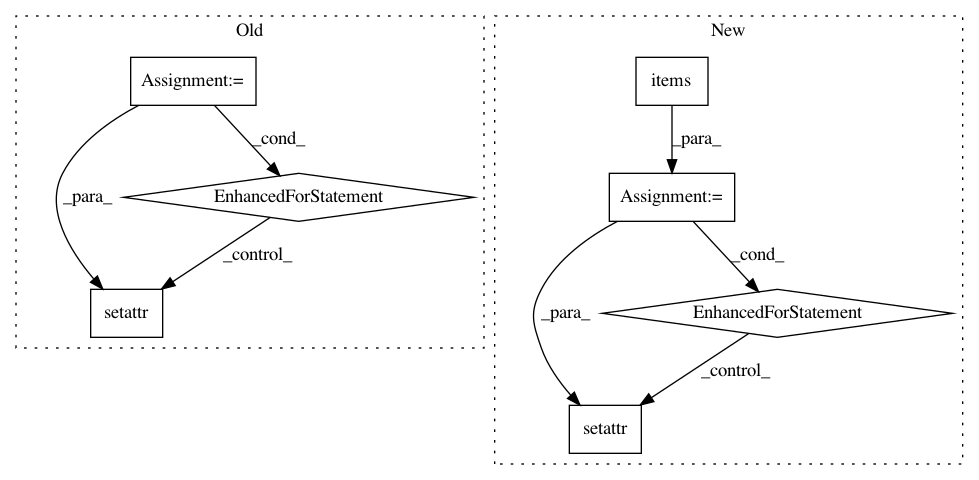
for key in cov_dict:
setattr(self, key, cov_dict[key])
def propagate(self, sensor_input):
Propagate the estimate and its covariance.
Given the propagation Jacobian F and the noise Jacobian G, the
After Change
"covariance": prior_values,
"process_noise": process_values,
"measurement_noise": obs_values}
for attribute, value in cov_dict.items():
setattr(self, attribute, value)
def propagate(self, sensor_input):
Propagate the estimate and its covariance.
Given the propagation Jacobian F and the noise Jacobian G, the