a6652b0c1997bb47dd502bf674e0b3b9b2d09d23,examples/reinforcement_learning/tutorial_bipedalwalker_a3c_continuous_action.py,,,#,254
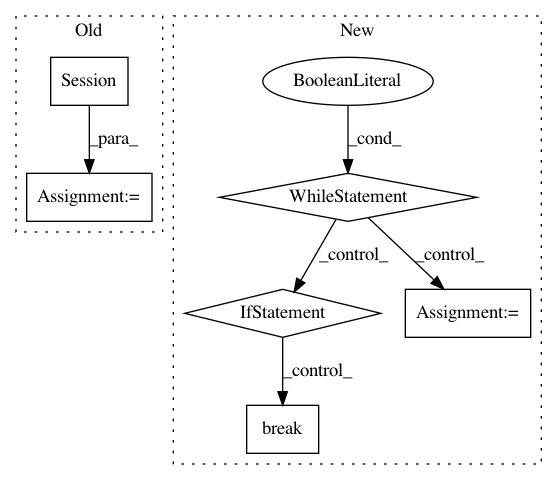
Before Change
if __name__ == "__main__":
sess = tf.Session()
// ============================= TRAINING ===============================
with tf.device("/cpu:0"):
OPT_A = tf.train.RMSPropOptimizer(LR_A, name="RMSPropA")
After Change
while True:
s = env.reset()
rall = 0
while True:
env.render()
s = s.astype("float32") // double to float
a = GLOBAL_AC.choose_action(s)
s, r, d, _ = env.step(a)
rall += r
if d:
print("reward", rall)
break
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 6
Instances
Project Name: tensorlayer/tensorlayer
Commit Name: a6652b0c1997bb47dd502bf674e0b3b9b2d09d23
Time: 2019-05-16
Author: 1402434478@qq.com
File Name: examples/reinforcement_learning/tutorial_bipedalwalker_a3c_continuous_action.py
Class Name:
Method Name:
Project Name: tensorlayer/tensorlayer
Commit Name: 6ca2a6359dc1374bfb211da8680f3d5f319cdaa5
Time: 2019-05-16
Author: 1402434478@qq.com
File Name: examples/reinforcement_learning/tutorial_bipedalwalker_a3c_continuous_action.py
Class Name:
Method Name:
Project Name: deepchem/deepchem
Commit Name: b83aeb11f157d41805114f1b58e65c172a67c6f0
Time: 2017-08-21
Author: proteneer@gmail.com
File Name: deepchem/trans/transformers.py
Class Name: ANITransformer
Method Name: transform_array