d78a2d1ddf7a0114c7cb36fb47cbf5a81c908485,tests/sensors/test_rgb_camera.py,,test_rgb_camera,#Any#Any#,43
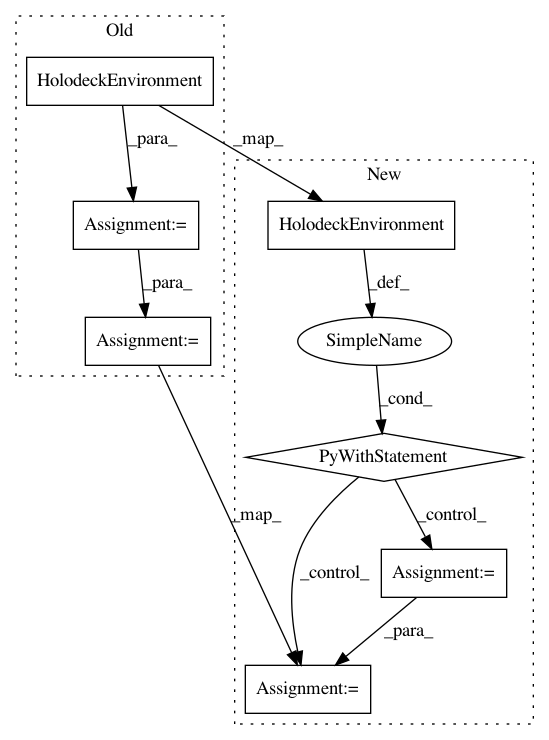
Before Change
}
binary_path = holodeck.packagemanager.get_binary_path_for_package("DefaultWorlds")
env = holodeck.environments.HolodeckEnvironment(scenario=cfg, binary_path=binary_path, uuid=str(resolution))
for _ in range(5):
env.tick()
pixels = env.tick()["RGBCamera"][:, :, 0:3]
env.__on_exit__()
baseline = cv2.imread(os.path.join(request.fspath.dirname, "expected", "{}.png".format(resolution)))
After Change
binary_path = holodeck.packagemanager.get_binary_path_for_package("DefaultWorlds")
with holodeck.environments.HolodeckEnvironment(scenario=cfg,
binary_path=binary_path,
show_viewport=False,
uuid=str(uuid.uuid4())) as env:
for _ in range(5):
env.tick()
pixels = env.tick()["RGBCamera"][:, :, 0:3]
baseline = cv2.imread(os.path.join(request.fspath.dirname, "expected", "{}.png".format(resolution)))
err = mse(pixels, baseline)
assert err < 2000
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 7
Instances
Project Name: BYU-PCCL/holodeck
Commit Name: d78a2d1ddf7a0114c7cb36fb47cbf5a81c908485
Time: 2019-06-17
Author: jaydenmilne@users.noreply.github.com
File Name: tests/sensors/test_rgb_camera.py
Class Name:
Method Name: test_rgb_camera
Project Name: BYU-PCCL/holodeck
Commit Name: 0766b49353c1dfecc8bda25219f24c7fa509f90e
Time: 2020-11-06
Author: powley.matthew@gmail.com
File Name: tests/agents/test_set_physics_state.py
Class Name:
Method Name: test_set_physics_state_vel
Project Name: BYU-PCCL/holodeck
Commit Name: 0766b49353c1dfecc8bda25219f24c7fa509f90e
Time: 2020-11-06
Author: powley.matthew@gmail.com
File Name: tests/agents/test_set_physics_state.py
Class Name:
Method Name: test_set_physics_state_loc_and_rot