fd1ba604a3ca228cebefe590a48e31893b664a66,examples/kalman_filter.py,KalmanFilter,initialize_covariances,#KalmanFilter#Any#Any#Any#,243
Before Change
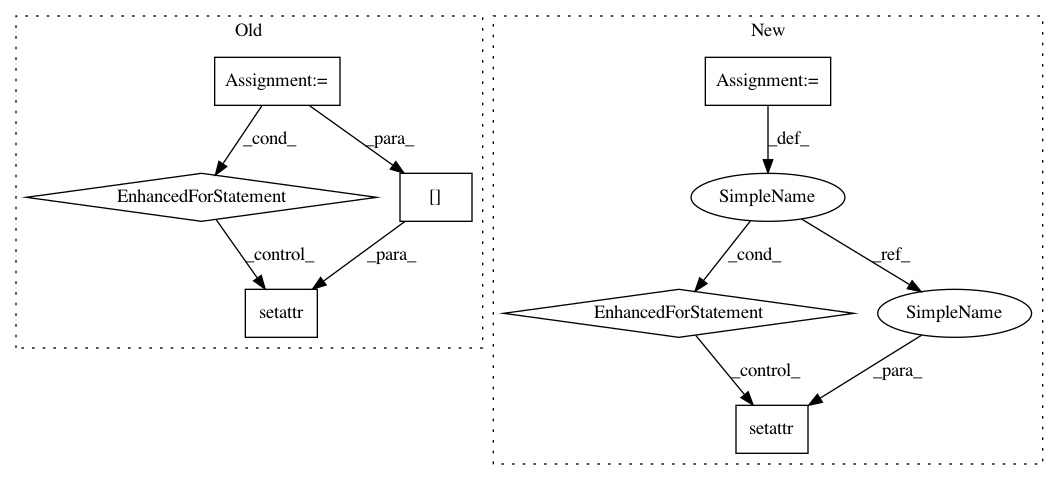
def initialize_covariances(self, prior_values, process_values, obs_values):
Set the values of the covariances.
values = [prior_values, process_values, obs_values]
attributes = ["covariance", "process_noise", "measurement_noise"]
for (index, val) in enumerate(values):
setattr(self, attributes[index], val)
def propagate(self, sensor_input):
Propagate the estimate and its covariance.
prop_noise = self.process_noise
prop_jac = self.model.propagation_jacobian(self.state, sensor_input)After Change
"covariance": prior_values,
"process_noise": process_values,
"measurement_noise": obs_values}
for key in cov_dict:
setattr(self, key, cov_dict[key])
def propagate(self, sensor_input):
Propagate the estimate and its covariance.
Given the propagation Jacobian F and the noise Jacobian G, theIn pattern: SUPERPATTERN
Frequency: 3
Non-data size: 7
Instances Project Name: geomstats/geomstats
Commit Name: fd1ba604a3ca228cebefe590a48e31893b664a66
Time: 2020-06-15
Author: 62605255+pchauchat@users.noreply.github.com
File Name: examples/kalman_filter.py
Class Name: KalmanFilter
Method Name: initialize_covariances
Project Name: geomstats/geomstats
Commit Name: fd1ba604a3ca228cebefe590a48e31893b664a66
Time: 2020-06-15
Author: 62605255+pchauchat@users.noreply.github.com
File Name: examples/kalman_filter.py
Class Name: KalmanFilter
Method Name: initialize_covariances
Project Name: geomstats/geomstats
Commit Name: 351bd9aff698b367007e5dcd8909181830fe9dac
Time: 2020-06-15
Author: 62605255+pchauchat@users.noreply.github.com
File Name: geomstats/learning/kalman_filter.py
Class Name: KalmanFilter
Method Name: initialize_covariances
Project Name: hanxiao/bert-as-service
Commit Name: d0eddfd7882f053bd6d6b6a7b0305f5c42d5d39f
Time: 2019-01-21
Author: hanhxiao@tencent.com
File Name: benchmark.py
Class Name:
Method Name: