) -> PolicyPrediction:
result = self._default_predictions(domain)
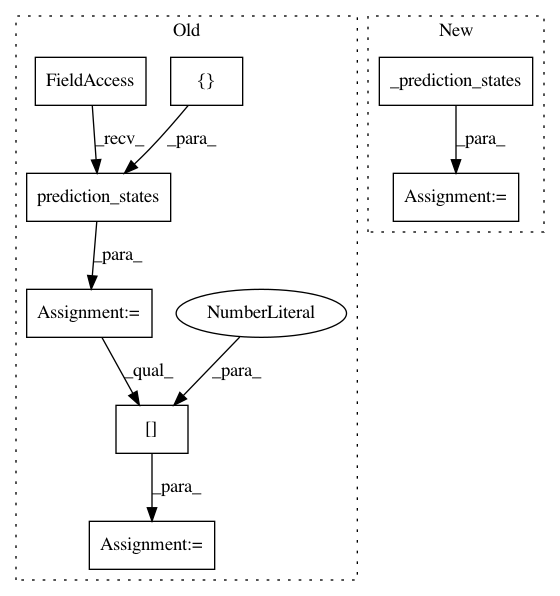
tracker_as_states = self.featurizer.prediction_states([tracker], domain)states = tracker_as_states[0]
logger.debug(f"Current tracker state:{self.format_tracker_states(states)}")
predicted_action_name = self.recall(states, tracker, domain)
if predicted_action_name is not None:
logger.debug(f"There is a memorised next action "{predicted_action_name}"")
After Change
result = self._default_predictions(domain)
states = self._prediction_states(tracker, domain)
logger.debug(f"Current tracker state:{self.format_tracker_states(states)}")
predicted_action_name = self.recall(states, tracker, domain)
if predicted_action_name is not None:
logger.debug(f"There is a memorised next action "{predicted_action_name}"")